Trong các ứng dụng công nghiệp, đôi khi nó có thể yêu cầu đo vị trí hoặc tốc độ của một vật thể quay như bánh xe hoặc trục / trục. Bộ mã hóa vòng quay là một thiết bị cơ điện có thể được sử dụng để lấy các phép đo này.
Có hai loại bộ mã hóa quay: bộ mã hóa quay tăng dần và bộ mã hóa quay tuyệt đối. Trong bài viết này, chúng ta sẽ xem xét bộ mã hóa quay tăng dần, nguyên lý làm việc và ứng dụng của chúng.
Bộ mã hóa vòng quay tăng dần là gì?
Bộ mã hóa tăng dần thuộc họ bộ mã hóa quay. Chúng được sử dụng để lấy thông tin như:
- Chức vụ
- góc
- Tốc độ quay

Bộ mã hóa vòng quay tăng dần được tìm thấy chủ yếu trong các ứng dụng yêu cầu phép đo tốc độ / vận tốc góc. Điều này được thực hiện bằng cách đếm số lượng xung trên một đơn vị thời gian do bộ mã hóa tạo ra.
Không giống như người anh em của nó, bộ mã hóa quay tuyệt đối, bộ mã hóa gia tăng không thể cung cấp thông tin khi trục không quay. Họ chỉ có thể cung cấp thông tin về chuyển động của trục.
Các xung được tạo ra bởi bộ mã hóa quay tăng dần phải được tính toán và xử lý ở nơi khác. Đây có thể là bộ vi điều khiển hoặc PLC (Bộ điều khiển logic khả trình). Sử dụng đếm xung, bộ điều khiển sau đó có thể chuyển đổi thông tin thành thông tin như vị trí, tốc độ và khoảng cách.
Bộ mã hóa vòng quay tăng dần hoạt động như thế nào?
Bộ mã hóa quay tăng dần có hai cấu hình:
- Bộ mã hóa gia tăng kênh đơn
- Bộ mã hóa kênh đôi (cầu phương)
Chức năng của chúng gần như tương tự nhau. Tuy nhiên, bộ mã hóa kênh đôi cho phép chúng tôi phát hiện hướng quay mà một bộ mã hóa kênh đơn không thể.
Nguyên tắc chức năng của bộ mã hóa quay tăng dần khá đơn giản. Cảm biến bao gồm một đĩa quay, có rãnh được gắn vào trục của nó.
Khi trục quay, đĩa cũng quay như hình bên. Đây còn được gọi là 'bánh mã'.
Các khe trên bánh xe được sử dụng để tạo ra 'xung' mỗi khi một khe phù hợp với cảm biến. Bộ mã hóa quay tăng dần sử dụng các công nghệ như từ tính, quang học, cảm ứng, điện dung và laser để tạo ra cái này tàu xung.
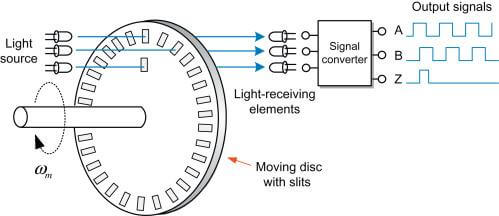
Sơ đồ trên minh họa hoạt động của bộ mã hóa quay tăng quang. Một nguồn sáng (LED) được đặt trên đĩa và thiết bị nhận (một photodiode / phototransistor) được đặt trong tầm nhìn.
Khi đĩa quay, các khe trong giây lát cho phép ánh sáng đi qua. Tại thời điểm này, chùm ánh sáng đến bộ thu và xuất ra tín hiệu CAO logic.
Khi đĩa quay thêm, chùm sáng bị cản trở và máy thu không nhận được chùm sáng. Điều này làm cho đầu ra của kênh tương ứng đó ở mức logic THẤP.
Bộ mã hóa quay tăng dần kênh kép có hai trong số các kênh này được đặt tên là kênh A và B. Vị trí đặt khe cho kênh B hơi lệch khỏi các khe cho kênh A.
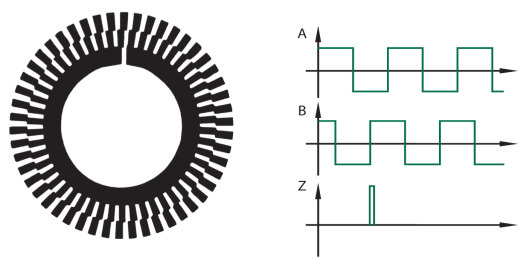
Đôi khi, cảm biến sử dụng một bộ khe duy nhất và các bộ thu được đặt trong một khoảng lệch.
Sự sắp xếp đặc biệt này cho phép các đầu ra A và B 'lệch pha'.
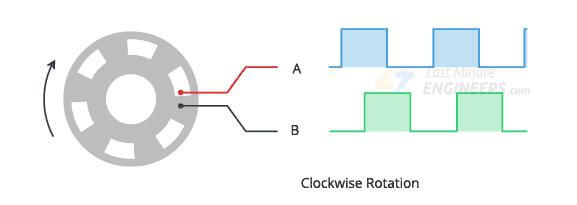
Bộ vi điều khiển hoặc PLC có thể giám sát cả hai kênh để phát hiện hướng quay.
Tùy thuộc vào kênh nào (A hoặc B) chỉ ra cạnh lên trước, hướng cũng có thể được phát hiện. Bộ mã hóa kênh đơn chỉ có đầu ra kênh A và chỉ có thể xuất ra một nhóm xung đơn.
Ví dụ, trong sơ đồ trên, một cạnh tăng trên A sau một cạnh lên trên B cho biết rằng bánh xe đang quay ngược chiều kim đồng hồ. Tương tự, một cạnh tăng trên B sau một cạnh lên A cho biết rằng bánh xe / trục quay theo chiều kim đồng hồ.
Trên một số cảm biến, có một kênh thứ ba được gọi là 'Z'. Không giống như hai kênh còn lại, thường chỉ có một khe cho kênh này. Điều này được sử dụng để tạo một xung mỗi vòng quay cho các nhiệm vụ như dẫn đường và xác minh đếm xung.
Bộ mã hóa tăng dần so với tuyệt đối
Bộ mã hóa tăng dần chỉ có thể hoạt động khi trục quay.
Các hệ thống sử dụng bộ mã hóa quay tăng dần phải có một chương trình phức tạp đang chạy để đếm các xung mà cảm biến đang tạo ra để xác định vị trí trục. Chúng có một đĩa có rãnh cách đều nhau đóng vai trò là bánh răng mã.
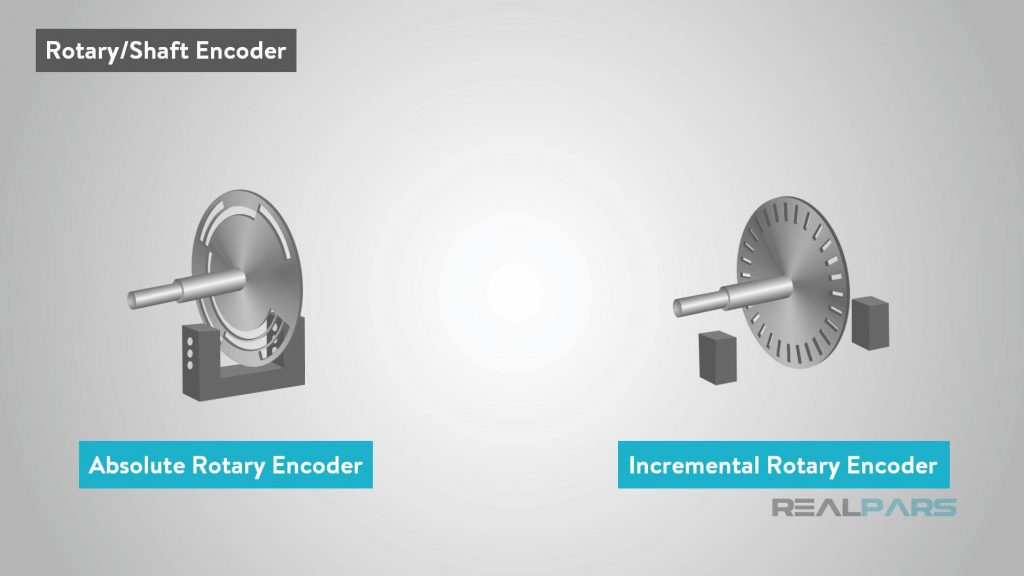
Bộ mã hóa tuyệt đối có một bánh mã chuyên dụng. Điều này chứa một mẫu rãnh không đồng nhất, một mã duy nhất cho mỗi vị trí của trục.
Đối với bất kỳ vị trí trục nhất định nào, một bộ mã hóa quay tuyệt đối sẽ xuất ra một mã nhị phân duy nhất mô tả chính xác vị trí đó. Nó cũng giữ lại đầu ra ngay cả khi tắt nguồn vì bản thân bánh mã có chứa mẫu.
Các bộ mã hóa tăng dần cần được bật nguồn mọi lúc để liên tục tạo ra tàu xung cho các tính toán vận tốc và khoảng cách. Tuy nhiên, các bộ mã hóa tuyệt đối có thể được bật khi cần thiết để có được kết quả đọc.
Độ phức tạp khôn ngoan, các bộ mã hóa gia tăng đơn giản hơn các bộ mã hóa tuyệt đối của chúng. Do đó, bộ mã hóa gia tăng ít tốn kém hơn bộ mã hóa quay tuyệt đối.
Bộ mã hóa tăng dần được sử dụng để làm gì?
Các bộ mã hóa vòng quay tăng dần tìm thấy các ứng dụng của chúng từ thiết bị gia dụng đến ô tô đến các ứng dụng tự động hóa trong công nghiệp.
Một trong những ứng dụng phổ biến nhất để cảm nhận vị trí là các nút điều khiển trên thiết bị điện tử như thiết lập radio trên xe hơi. Các núm xoay có thể điều chỉnh vô hạn và chỉ hoạt động khi thiết bị được bật nguồn.
Trong những ngày trước đó, chuột máy tính cơ điện cũng sử dụng các cảm biến này để theo dõi vị trí dọc theo hai trục.
Trong các ứng dụng công nghiệp, bộ mã hóa gia tăng được sử dụng để đo tốc độ của các hệ thống cơ khí. Điều này đặc biệt hữu ích trong các hệ thống điều khiển chuyển động như băng tải vật liệu, cánh tay robot và máy CNC.
Thông số kỹ thuật bộ mã hóa tăng dần
Khi chọn một bộ mã hóa cho một ứng dụng cụ thể, có nhiều yếu tố cần xem xét.
- Đường kính ngoài
- Đường kính ngoài của vỏ cảm biến (hữu ích khi lắp)
- Loại và đường kính trục
- Có các lựa chọn cho loại trục như trục rỗng, trục rỗng nửa, trục rỗng mù và qua lỗ khoan.
- Đường kính phải nằm trong dung sai để được ghép nối phù hợp với vật thể. Trục 20mm, 25mm và 30mm có sẵn.
- Đường ra và chiều dài cáp
- Vị trí của kết nối cáp đầu ra. Có hai cấu hình: bên và bên ngoài.Cấu hình bên cho phép kết nối cáp có thể tháo rời ở bên cạnh. Loại cáp đầu ra có cáp cố định đi ra phía sau của vỏ cảm biến.
- Đối với cáp cố định, các cảm biến thường được trang bị cáp 2M màu đen.
- Cung câp hiệu điện thê
- Cho biết điện áp hoạt động tối đa của cảm biến. Có các tùy chọn cho nguồn cung cấp DC% v (cố định), 5-12V, 12-24V và 24V (cố định).
- Loại tín hiệu đầu ra
- A cho bộ mã hóa kênh đơn, A và B cho bộ mã hóa kênh đôi (cầu phương) và Z tùy chọn cho đầu ra xung chỉ mục
- Đếm xung
- Thông số này mô tả các giá trị xung trên mỗi vòng quay (PPR) và bộ đếm trên mỗi vòng quay (CPR) mà cảm biến hỗ trợ.
- Phương thức đầu ra tín hiệu
- Loại tín hiệu đầu ra: đầu ra điện áp (V) / dòng điện (C), đầu ra bổ sung (F) hoặc đầu ra truyền động (L, T)
Đặc tính điện của bộ mã hóa tăng dần
- Cung câp hiệu điện thê
- Có thể thay đổi từ 5V đến 24V
- Mức tiêu thụ hiện tại
- Đối với các loại đầu ra điện áp và dòng điện, mức tiêu thụ dòng điện điển hình là nhỏ hơn 60mA. Các loại trình điều khiển có thể tiêu thụ tới 100mA.
- Điện áp đầu ra (đối với loại đầu ra điện áp)
- Điện áp mức cao:> = 3.5V
- Điện áp mức THẤP: <= 0.5V
- Thời gian tăng và giảm
- Mô tả cảm biến thời gian cần để thay đổi đầu ra từ cao xuống thấp (giảm) hoặc thấp đến cao (tăng)
- Thời gian tăng điển hình cho loại đầu ra điện áp: <= 500ns
- Thời gian rơi điển hình cho loại đầu ra điện áp: <= 100ns
- Đáp ứng tần số
- Tần số tối đa mà cảm biến có thể chuyển đổi đầu ra của nó
- Thường rơi xuống dưới 300kHz
Mạch mã hóa quay tăng dần
Như đã đề cập trước đây, bộ mã hóa quay có thể được kết nối với PLC hoặc vi điều khiển để đo tốc độ, vị trí, khoảng cách và hướng quay của trục. Các thiết bị này cần được lập trình đặc biệt để tính toán các giá trị này và đưa ra quyết định.
Ngoài ra còn có các thiết bị chuyên dụng như bộ đếm và máy đo tốc độ có thể thực hiện các phép tính này ngay lập tức và chỉ ra trực tiếp các giá trị. Chúng ta hãy xem xét một số mạch mà chúng ta có thể xây dựng bằng cách sử dụng bộ mã hóa quay tăng dần:
Máy đo tốc độ tự cấp nguồn
Sử dụng H7ER Máy đo tốc độ tự cấp nguồn của Omron, một bộ mã hóa gia tăng một kênh có thể được sử dụng để thiết lập máy đo tốc độ có thể hiển thị RPM của trục.

Sản phẩm E6A2 là bộ mã hóa gia tăng cầu phương loại AB với đầu ra NPN, bộ thu mở. Kết nối nó với H7ER, hệ thống hoạt động như một máy đo tốc độ đếm tần số của các xung để xác định RPM của trục được kết nối.
Bộ đếm tăng / giảm tốc độ cao
Sản phẩm K3NC là bộ đếm tăng / giảm tốc độ cao với nhiều chế độ đầu ra. Thiết bị này có thể được kết nối với bộ mã hóa vòng quay loại AB để tạo thành bộ đếm lên / xuống theo hướng quay.
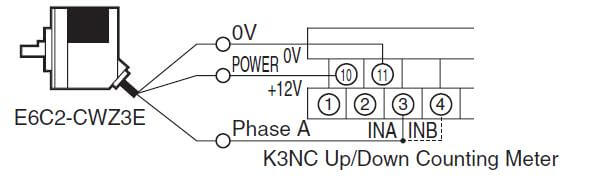
Với thiết lập này, đồng hồ đếm có thể được cấu hình để xuất tín hiệu bật / tắt máy so sánh số xung. Nó cũng hỗ trợ giao tiếp với PLC cho các ứng dụng điều khiển quá trình.
Việc sử dụng các thành phần có sẵn này có thể loại bỏ nhu cầu về một thiết bị phức tạp như PLC, nơi nó không thực sự cần thiết. Điều này đặc biệt hữu ích cho các hệ thống quy mô nhỏ hơn.
Để sử dụng trong hệ thống dựa trên PLC, nên sử dụng thẻ HSC (Bộ đếm tốc độ cao) cho các ứng dụng tốc độ cao. Hình dưới đây cho thấy kết nối của bộ mã hóa quay tăng dần kiểu cực thu mở PNP với thẻ đầu vào HSC được kết hợp với PLC.
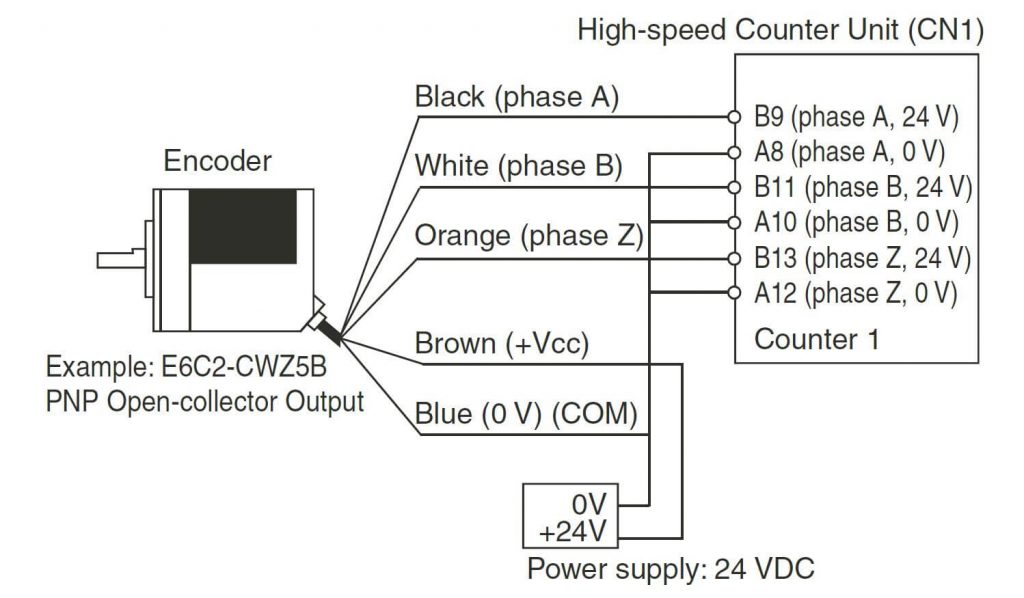
Cảm biến có các đầu ra A, B và Z và chúng được kết nối với thẻ HSC như hình trên. Thẻ bộ đếm có thể được cấu hình để gửi bộ đếm đọc tốc độ trục bộ mã hóa đến PLC. Thiết lập này làm giảm chi phí xử lý trong chương trình PLC.
Arduino mã hóa quay tăng dần
Trong các mạch dựa trên Arduino, bộ mã hóa quay được sử dụng làm đầu vào cho các chương trình của chúng tôi.
Chúng ta có thể sử dụng chúng để tăng / giảm giá trị của một biến cho các tác vụ như điều khiển tốc độ của động cơ hoặc độ sáng của đèn LED. Trong các ứng dụng nâng cao hơn, bộ mã hóa quay cũng được sử dụng để điều hướng qua các menu.
KY-040 là một mô-đun mã hóa quay có sẵn cho Arduinos. Nó có sơ đồ chân sau:
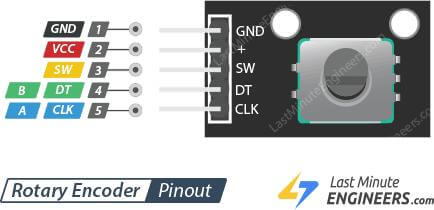
- GND - Kết nối mặt đất
- Nguồn cung cấp VCC - 5V hoặc 3.3V
- SW - đầu ra công tắc nút nhấn (0V khi nhấn, 5V khi nghỉ)
- DT - Đầu ra dữ liệu
- CLK - Đầu ra đồng hồ
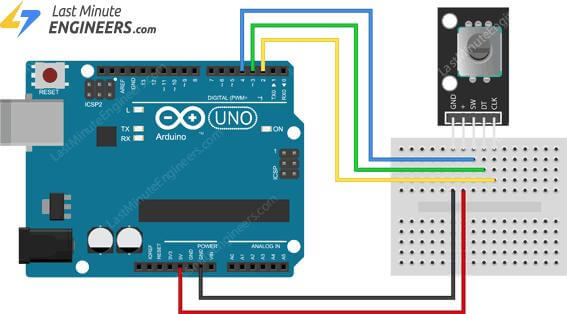
Là một mạch ví dụ, chúng ta hãy xem một mạch thử nghiệm trong đó bộ mã hóa được kết nối với Arduino UNO. Chân SW của cảm biến được kết nối với chân 4, CLK với chân 2 và DT được kết nối với chân 3 của Arduino.
VCC được kết nối với + 5V và GND được kết nối với chân GND của bảng phát triển Arduino như hình dưới đây.
Mã Arduino cho bộ mã hóa quay
Mã ví dụ này đã được điều chỉnh từ phút cuối cùng.com. Nó thực hiện hai chức năng chính:
- Chờ tín hiệu CLK (chân 2) thay đổi
- Quan sát xem nút có được nhấn không (chân 4 ở mức THẤP)
Khi xoay núm bộ mã hóa, chương trình sẽ phát hiện sự thay đổi trong dòng CLK. Sau đó, nó sẽ kiểm tra trạng thái của chân DT.
Nếu cả hai đều giống nhau, bộ mã hóa đang được xoay theo chiều kim đồng hồ và ngược chiều kim đồng hồ nếu ngược lại. Trong khi đó, đối với mỗi lần phát hiện, biến chống lạiGiá trị của cũng được tăng / giảm tùy theo hướng.
Chương trình cũng kiểm tra trạng thái nút của bộ mã hóa. Nếu nó được nhấn, chương trình sẽ in 'nút được nhấn' lên màn hình nối tiếp. Nó cũng in giá trị hiện tại của số lượng xung đếm được.
| // Đầu vào của bộ mã hóa quay #định nghĩa CLK2 #định nghĩa DT 3 #định nghĩa SW 4int bộ đếm = 0; int currentStateCLK; int cuối cùngCLK; String currentDir = ””; unsigned Dài nút bấm cuối cùng = 0;làm mất hiệu lực thiết lập() { // Đặt chân bộ mã hóa làm đầu vào // Thiết lập trình theo dõi nối tiếp // Đọc trạng thái ban đầu của CLK làm mất hiệu lực vòng lặp() { // Đọc trạng thái hiện tại của CLK // Nếu trạng thái cuối cùng và trạng thái hiện tại của CLK khác nhau, thì xung đã xảy ra // Nếu trạng thái DT khác với trạng thái CLK thì Serial.print (“Hướng:“); // Nhớ trạng thái CLK cuối cùng // Đọc trạng thái nút // Nếu chúng tôi phát hiện tín hiệu THẤP, nút sẽ được nhấn // Ghi nhớ sự kiện nhấn nút cuối cùng // Đặt một chút thời gian trễ để giúp xóa bỏ việc đọc |
Cách kiểm tra bộ mã hóa tăng dần bằng đồng hồ vạn năng
Để khắc phục sự cố một bộ mã hóa với đồng hồ vạn năng, nó cần được bật nguồn. Sau khi bật nguồn, đặt đồng hồ vạn năng ở chế độ đo vôn DC và kết nối đầu dò màu đen với dây GND của cảm biến.
Từ từ quay trục của cảm biến trong khi thăm dò các đầu ra A hoặc B của cảm biến.
Phép đo điện áp phải dao động trong khoảng gần 0V và VCC của cảm biến. Lưu ý rằng trục cần quay cực chậm để đồng hồ vạn năng ổn định số đọc của nó.
Nếu phép đo điện áp không thay đổi, hãy chuyển đồng hồ vạn năng sang chế độ AC và lặp lại các phép đo tương tự. Lần này, quay trục nhanh hơn. Nếu kết quả đọc từ đồng hồ vạn năng chỉ ra điện áp khác XNUMX, thì có thể kết luận rằng bộ mã hóa đang hoạt động.
Tuy nhiên, đây không phải là phương pháp khắc phục sự cố chính xác 100%. Mặc dù đồng hồ vạn năng hiển thị số đọc điện áp, cảm biến vẫn có thể bị trục trặc. Trong trường hợp này, thời gian của cảm biến cần được phân tích. Đối với các nhiệm vụ như vậy, một máy hiện sóng là bắt buộc.
Kết luận
Trong bài viết này, chúng tôi đã thảo luận về hoạt động, nguyên lý làm việc và các ứng dụng của bộ mã hóa vòng quay tăng dần.
Trong khi bộ mã hóa gia tăng là phổ biến nhất, bộ mã hóa quay tuyệt đối có thể có lợi trong một số trường hợp nhất định. Chọn cảm biến phù hợp nhất cho ứng dụng của bạn bằng cách xem xét các đặc điểm mà chúng tôi đã thảo luận trong bài viết này.
Nó sẽ không chỉ cải thiện hiệu suất và độ tin cậy của hệ thống mà còn cắt giảm mọi chi phí không cần thiết liên quan.

