Endüstriyel uygulamalarda bazen tekerlek veya mil/aks gibi dönen bir nesnenin konumunun veya hızının ölçülmesini gerektirebilir. Döner kodlayıcı, bu ölçümleri elde etmek için kullanılabilecek elektromekanik bir cihazdır.
İki tür döner kodlayıcı vardır: artımlı döner kodlayıcılar ve mutlak döner kodlayıcılar. Bu yazıda, bakacağız artımlı döner kodlayıcılar, çalışma prensipleri ve uygulamaları.
Artımlı Döner Kodlayıcı nedir?
Artımlı kodlayıcılar ailesine aittir döner kodlayıcılar. Aşağıdakiler gibi bilgileri elde etmek için kullanılırlar:
- Pozisyon
- açı
- Dönme hızı

Artımlı döner kodlayıcılar, esas olarak hız/açısal hız ölçümünün gerekli olduğu uygulamalarda bulunur. Bu, kodlayıcı tarafından birim zaman başına üretilen darbe sayısı sayılarak yapılır.
Kardeşi olan mutlak döner enkoderden farklı olarak, artımlı enkoderler mil dönmediğinde bilgi sağlayamaz. Onlar sadece hakkında bilgi sağlayabilirler. hareket şaftın.
Artımlı döner kodlayıcı tarafından üretilen darbeler başka bir yerde hesaplanmalı ve işlenmelidir. Bu bir mikrodenetleyici veya bir PLC (Programlanabilir Mantık Denetleyicisi) olabilir. Kontrolör, darbe sayısını kullanarak bilgileri aşağıdaki gibi bilgilere dönüştürebilir: konum, hız ve mesafe.
Artımlı Döner Kodlayıcı Nasıl Çalışır?
Artımlı döner kodlayıcılar iki konfigürasyonda gelir:
- Tek kanallı artımlı kodlayıcılar
- Çift kanallı (Dörtlü) kodlayıcılar
İşlevleri neredeyse birbirine benzer. Bununla birlikte, çift kanallı kodlayıcılar, tek kanallı bir kodlayıcının yapamayacağı dönüş yönünü algılamamıza izin verir.
Artımlı bir döner kodlayıcının işlevsel ilkesi oldukça basittir. Sensör, şaftına bağlı dönen, oluklu bir diskten oluşur.
Mil dönerken disk de aşağıdaki şekilde gösterildiği gibi döner. Bu aynı zamanda 'kod çarkı' olarak da bilinir.
Çarktaki yuvalar, bir yuvanın sensörle aynı hizaya geldiği her seferde 'darbeler' üretmek için kullanılır. Artımlı döner kodlayıcılar, aşağıdaki gibi teknolojileri kullanır: manyetik, optik, endüktif, kapasitif ve lazer bunu oluşturmak için nabız treni.
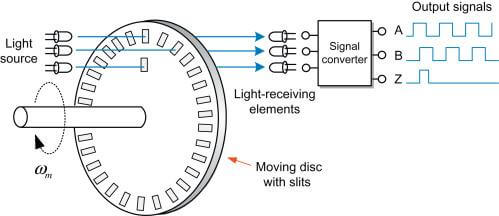
Yukarıdaki diyagram, bir optik artımlı döner kodlayıcının çalışmasını gösterir. Diskin üzerine bir ışık kaynağı (LED) yerleştirilir ve alıcı cihaz (bir fotodiyot/fototransistör) görüş hattına yerleştirilir.
Disk döndüğünde, yuvalar anlık olarak ışığın geçmesine izin verir. Bu anda, ışık huzmesi alıcıya ulaşır ve mantıksal bir YÜKSEK sinyali verir.
Disk daha fazla döndüğünde, ışık huzmesi engellenir ve alıcı ışını almaz. Bu, ilgili kanalın çıkışının mantık DÜŞÜK olmasına neden olur.
Çift kanallı artımlı döner kodlayıcılar, kanal A ve B olarak adlandırılan bu kanallardan ikisine sahiptir. Kanal B için yuva yerleşimi, kanal A yuvalarından biraz farklıdır.
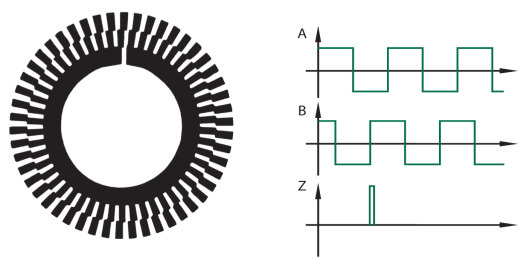
Bazen sensör tek bir yuva seti kullanır ve alıcılar bir ofset içine yerleştirilir.
Bu özel düzenleme, A ve B çıkışlarının 'faz dışı' olmasına izin verir.
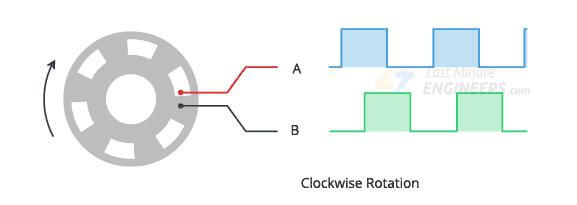
Mikrodenetleyici veya PLC, dönüş yönünü tespit etmek için her iki kanalı da izleyebilir.
Hangi kanalın (A veya B) önce yükselen kenarı gösterdiğine bağlı olarak, yön de tespit edilebilir. Tek kanallı kodlayıcılar yalnızca kanal A çıkışına sahiptir ve yalnızca tek bir darbe dizisi çıkışı verebilir.
Örneğin, yukarıdaki diyagramda, B üzerinde yükselen kenardan sonra A üzerinde yükselen kenar, çarkın saat yönünün tersine döndüğünü gösterir. Benzer şekilde, A üzerinde yükselen kenardan sonra B üzerinde yükselen kenar, çarkın/milin saat yönünde döndüğünü gösterir.
Bazı sensörlerde 'Z' adı verilen üçüncü bir kanal bulunur. Diğer iki kanalın aksine, bu kanal için genellikle yalnızca bir yuva bulunur. Bu oluşturmak için kullanılır devir başına bir darbe gibi görevler için yuvaya dönen ve nabız sayısı doğrulaması.
Artımlı ve Mutlak Kodlayıcı
Artımlı kodlayıcılar yalnızca mil dönerken çalışabilir.
Artımlı döner kodlayıcılar kullanan sistemlerde, şaft konumunu belirlemek için sensörün ürettiği darbeleri saymak için çalışan karmaşık bir program olmalıdır. Kod tekeri görevi gören eşit aralıklı yuvalı bir diskleri vardır.
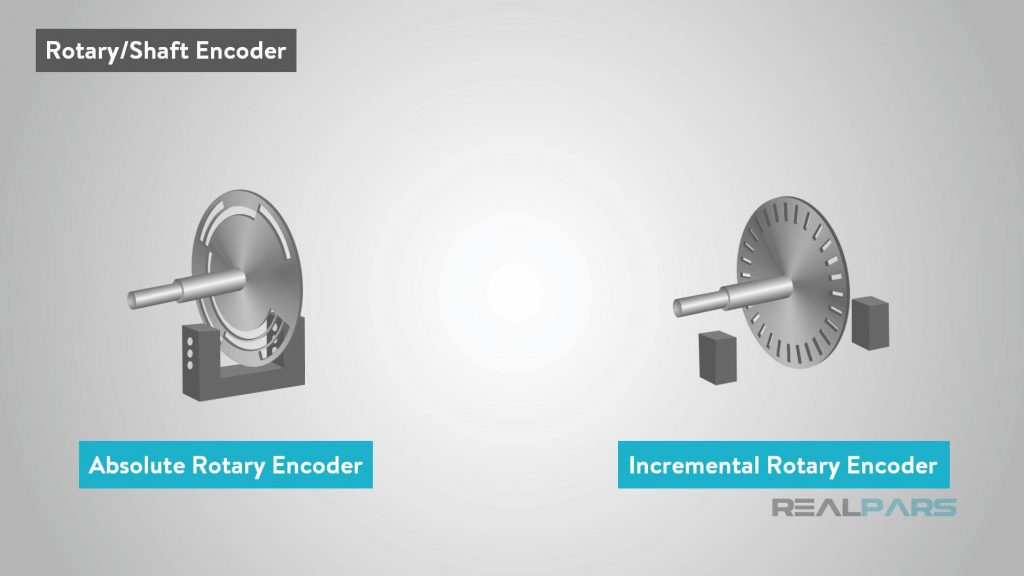
Mutlak kodlayıcıların özel bir kod tekeri vardır. Bu, milin her konumu için benzersiz bir kod olan tek tip olmayan bir yuva düzeni içerir.
Herhangi bir şaft konumu için, mutlak bir döner kodlayıcı, konumu doğru bir şekilde tanımlayan benzersiz bir ikili kod verir. Kod tekerinin kendisi deseni içerdiğinden, kapatıldığında bile çıktıyı korur.
Hız ve mesafe hesaplamaları için sürekli olarak darbe katarı oluşturmak için artımlı kodlayıcıların her zaman açık olması gerekir. Ancak, bir okuma elde etmek için gerektiğinde mutlak kodlayıcılar açılabilir.
Karmaşıklık açısından, artımlı kodlayıcılar, mutlak muadillerinden daha basittir. Bu nedenle, artımlı kodlayıcılar, mutlak döner kodlayıcılardan daha ucuzdur.
Artımlı Kodlayıcılar Ne İçin Kullanılır?
Artımlı döner kodlayıcılar, ev aletlerinden otomobillere ve endüstriyel otomasyon uygulamalarına kadar uygulamalarını bulur.
Konum algılama için en popüler uygulamalardan biri, araç radyosu kurulumları gibi elektronik ekipmanlardaki kontrol düğmeleridir. Döner düğmeler kademesiz olarak ayarlanabilir ve yalnızca cihaz açıkken çalışır.
Daha önceki günlerde, elektromekanik bilgisayar fareleri de bu sensörleri iki eksen boyunca konumu izlemek için kullanıyordu.
Endüstriyel uygulamalarda, mekanik sistemlerin hızını ölçmek için artımlı kodlayıcılar kullanılır. Bu, özellikle malzeme konveyörleri, robotik kollar ve CNC makineleri gibi hareket kontrol sistemlerinde kullanışlıdır.
Artımlı Kodlayıcı Özellikleri
Belirli bir uygulama için bir kodlayıcı seçerken, dikkate alınması gereken birden çok faktör vardır.
- dış çap
- Sensör muhafazasının dış çapı (montaj sırasında kullanışlıdır)
- Mil tipi ve çapı
- Mil tipi için delikli mil, yarım delikli mil, kör delik mil ve açık delik gibi seçenekler mevcuttur.
- Çap, nesneyle düzgün bir şekilde akuple edilebilmesi için toleranslar dahilinde olmalıdır. 20mm, 25mm ve 30mm milleri mevcuttur.
- Çıkış yolu ve kablo uzunluğu
- Çıkış kablosu bağlantısının konumu. İki yapılandırma vardır: yan ve dışarı.Yan konfigürasyon, yandan ayrılabilir bir kablonun bağlanmasına izin verir. Kablo çıkış tipi, sensör muhafazasının arkasından çıkan sabit bir kabloya sahiptir.
- Sabit kablolar için sensörler genellikle 2M siyah renkli kabloyla donatılmıştır.
- Besleme gerilimi
- Sensörün maksimum çalışma voltajını gösterir. %v (sabit), 5-12V, 12-24V ve 24V(sabit) DC besleme seçenekleri mevcuttur.
- Çıkış sinyali tipi
- Tek kanallı kodlayıcılar için A, çift kanallı (dörtlü) kodlayıcılar için A ve B ve indeks darbe çıkışı için isteğe bağlı bir Z
- Nabız sayısı
- Bu parametre, sensörün desteklediği devir başına darbe (PPR) ve devir başına sayaç (CPR) değerlerini açıklar.
- Sinyal çıkış yöntemi
- Çıkış sinyalinin türü: voltaj (V)/akım(C) çıkışı, tamamlayıcı(F) çıkışı veya hat sürücüsü(L, T) çıkışı
Artımlı Enkoder Elektriksel Özellikleri
- Besleme gerilimi
- 5V ile 24V arasında değişebilir
- Anlık tüketim
- Gerilim ve akım çıkış tipleri için tipik akım tüketimi 60mA'dan azdır. Sürücü tipleri 100mA'ya kadar tüketebilir.
- Çıkış voltajı (voltaj çıkış tipi için)
- YÜKSEK seviye voltajı: >= 3.5V
- DÜŞÜK seviye voltajı: <=0.5V
- Yükseliş ve Düşüş zamanları
- Sensörün çıkışı yüksekten düşüğe(düşme) veya düşükten yükseğe(yükselme) değiştirmesi için geçen süreyi tanımlar
- Gerilim çıkış tipi için tipik yükselme süresi: <= 500ns
- Gerilim çıkış tipi için tipik düşme süresi: <= 100ns
- Frekans tepkisi
- Sensörün çıkışlarını değiştirebileceği maksimum frekans
- Tipik olarak 300kHz'in altına düşer
Artımlı Döner Enkoder Devresi
Daha önce bahsedildiği gibi, döner kodlayıcılar, bir milin hızını, konumunu, mesafesini ve dönüş yönünü ölçmek için PLC'ler veya mikro denetleyiciler ile bağlanabilir. Bu cihazların bu değerleri hesaplamak ve karar vermek için özel olarak programlanması gerekir.
Bu hesaplamaları kutudan çıktığı gibi yapabilen ve doğrudan değerleri gösteren sayaçlar ve takometreler gibi özel cihazlar da bulunmaktadır. Artımlı döner kodlayıcılar kullanarak oluşturabileceğimiz bazı devrelere bir göz atalım:
Kendi kendine çalışan takometre
Kullanma H7ER Omron'un kendi kendine güç sağlayan serisi takometre, bir milin devrini görüntüleyebilen bir takometre ayarlamak için tek kanallı artımlı bir kodlayıcı kullanılabilir.

The E6A2 NPN, açık kollektör çıkışlı AB tipi dörtlü artımlı kodlayıcıdır. H7ER ile bağlanan sistem, bağlı şaftın devrini belirlemek için darbelerin frekansını sayan bir takometre görevi görür.
Yüksek hızlı yukarı/aşağı sayacı
The K3NC çeşitli çıkış modlarına sahip yüksek hızlı bir yukarı/aşağı sayıcıdır. Bu cihaz, dönüş yönüne göre yukarı/aşağı bir sayaç oluşturmak için AB tipi döner kodlayıcı ile bağlanabilir.
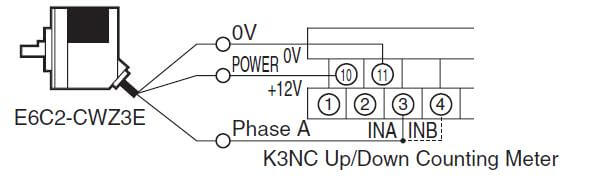
Bu kurulumla, sayma ölçer, darbe sayısını karşılaştıran bir makineyi açmak/kapatmak için bir sinyal verecek şekilde yapılandırılabilir. Ayrıca proses kontrol uygulamaları için bir PLC ile iletişimi de destekler.
Bu hazır bileşenlerin kullanılması, kesinlikle gerekli olmadığı durumlarda PLC gibi karmaşık bir cihaza olan ihtiyacı ortadan kaldırabilir. Bu, özellikle daha küçük ölçekli sistemler için kullanışlıdır.
PLC tabanlı bir sistemde kullanım için, yüksek hızlı uygulamalar için bir HSC kartı (Yüksek Hızlı Sayaç) önerilir. Aşağıdaki şekil, bir PNP açık kollektör tipi artımlı döner kodlayıcının bir PLC ile birleştirilmiş bir HSC giriş kartına bağlantısını göstermektedir.
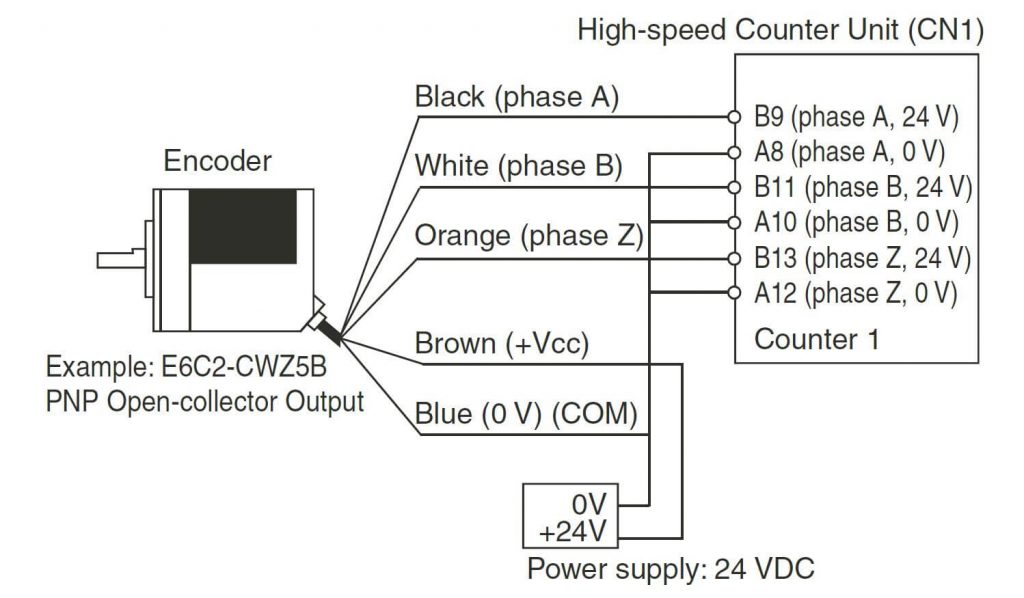
Sensörün A, B ve Z çıkışları vardır ve bunlar yukarıda gösterildiği gibi HSC kartına bağlanır. Sayaç kartı, enkoder şaft hızını okuyan sayacı PLC'ye gönderecek şekilde yapılandırılabilir. Bu kurulum, PLC programındaki işlem yükünü azaltır.
Artımlı Döner Kodlayıcı Arduino
Arduino tabanlı devrelerde, programlarımıza girdi olarak döner kodlayıcılar kullanılmaktadır.
Bunları, bir motorun hızını veya bir LED'in parlaklığını kontrol etmek gibi görevler için bir değişkenin değerini artırmak/azaltmak için kullanabiliriz. Daha gelişmiş uygulamalarda, menüler arasında gezinmek için de döner kodlayıcılar kullanılır.
KY-040, Arduinos için kullanıma hazır bir döner kodlayıcı modülüdür. Aşağıdaki pin çıkışına sahiptir:
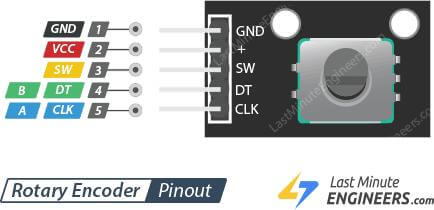
- GND – Toprak bağlantısı
- VCC – 5V veya 3.3V besleme
- SW – basmalı düğme anahtarı çıkışı (basıldığında 0V, dinlenirken 5V)
- DT – Veri çıkışı
- CLK – Saat çıkışı
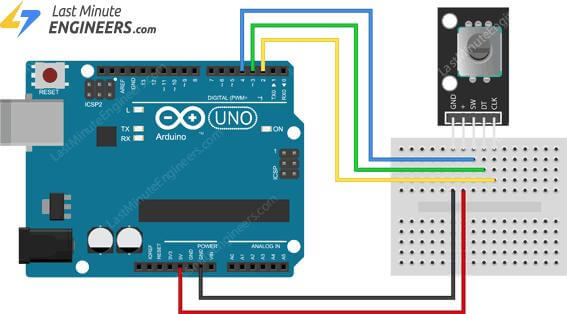
Örnek devre olarak enkoderin bir Arduino UNO'ya bağlı olduğu bir test devresine bakalım. Sensörün SW pini, pin 4'e, CLK pin 2'ye ve DT, Arduino'nun pin 3'e bağlanır.
VCC, +5V'a bağlanır ve GND, Arduino geliştirme kartının GND pinine aşağıda gösterildiği gibi bağlanır.
Döner Kodlayıcı için Arduino Kodu
Bu örnek kod şuradan uyarlanmıştır: Last minuteengineers.com. İki ana işlevi yerine getirir:
- CLK sinyalinin (pin 2) değişmesini bekleyin
- Düğmeye basılıp basılmadığını gözlemleyin (pim 4 DÜŞÜK)
Enkoder düğmesi döndürüldüğünde, program CLK satırındaki değişikliği algılar. Ardından DT pininin durumunu kontrol eder.
Her ikisi de aynıysa, kodlayıcı saat yönünde, aksi takdirde saat yönünün tersine döndürülür. Bu arada, her algılama için değişken karşı' değeri de yöne bağlı olarak artar/azalır.
Program ayrıca kodlayıcının düğme durumunu da kontrol eder. Basıldığında, program seri monitöre 'düğmeye basıldı' yazdırır. Ayrıca sayılan pals sayısının mevcut değerini de yazdırır.
| // Döner Enkoder Girişleri #tanımlamak KL 2 #tanımlamak DT 3 #tanımlamak SW 4int sayaç = 0; int mevcutDevletCLK; int lastStateCLK; String currentDir =””; imzasız ve kazandırdı lastButtonPress = 0;geçersiz kurulum() { // Encoder pinlerini giriş olarak ayarla // Seri Monitör Kurulumu // CLK'nın ilk durumunu oku geçersiz döngü() { // CLK'nın mevcut durumunu oku // CLK'nın son durumu ve mevcut durumu farklıysa, darbe oluştu // DT durumu CLK durumundan farklıysa, o zaman Serial.print(“Yön: “); // Son CLK durumunu hatırla // Düğme durumunu oku // DÜŞÜK sinyal algılarsak butona basılır // Son butona basma olayını hatırla // Okumanın geri dönmesine yardımcı olmak için hafif bir gecikme koyun |
Multimetre ile Artımlı Kodlayıcı Nasıl Kontrol Edilir
Multimetreli bir kodlayıcıda sorun gidermek için açık olması gerekir. Gücü açtıktan sonra multimetreyi DC volt ölçüm moduna ayarlayın ve siyah probu sensörün GND kablosuna bağlayın.
Sensörün A veya B çıkışlarını incelerken sensörün milini yavaşça çevirin.
Voltaj ölçümü, sensörün 0V'a yakın ve VCC'si arasında dalgalanıyor olmalıdır. Multimetrenin okumasını stabilize etmesine izin vermek için milin son derece yavaş dönmesi gerektiğini unutmayın.
Voltaj ölçümü değişmiyorsa multimetreyi AC moduna alın ve aynı ölçümleri tekrarlayın. Bu sefer mili daha hızlı çevirin. Multimetreden okuma sıfır olmayan bir voltaj gösteriyorsa, kodlayıcının işlevsel olduğu sonucuna varılabilir.
Ancak bu, %100 doğru bir sorun giderme yöntemi değildir. Multimetre bir voltaj okuması gösterse bile sensör hala arızalı olabilir. Bu durumda, sensörün zamanlamasının analiz edilmesi gerekir. Bu tür görevler için bir osiloskop gereklidir.
Sonuç
Bu yazımızda artımlı döner enkoderlerin işleyişini, çalışma prensibini ve uygulamalarını ele aldık.
Artımlı kodlayıcılar en popüler olmakla birlikte, belirli durumlarda mutlak döner kodlayıcılar avantajlı olabilir. Bu yazıda ele aldığımız özellikleri göz önünde bulundurarak uygulamanız için en uygun sensörü seçin.
Yalnızca sisteminizin performansını ve güvenilirliğini artırmakla kalmayacak, aynı zamanda gereksiz maliyetleri de azaltacaktır.

