Döner kodlayıcı, miller ve akslar gibi dönen nesneleri izlemek için kullanılan elektromekanik bir cihazdır. Dönen milin konumunu, mesafesini ve açısal hızını ölçmek için döner kodlayıcılar kullanılabilir.
İki tür döner kodlayıcı vardır: artımlı döner kodlayıcılar ve mutlak döner kodlayıcılar. Bu yazıda, bakacağız mutlak döner kodlayıcılar, çalışma prensipleri ve uygulamaları.
Mutlak Döner Kodlayıcı nedir?
Mutlak döner kodlayıcılar ailesine aittir. döner kodlayıcılar. Mil veya aks gibi dönen nesnelerin aşağıdaki parametrelerini ölçmek için kullanılırlar:
- Açısal hız
- Pozisyon bilgisi
- Mesafe

Mutlak döner kodlayıcılar, konum ve açısal yer değiştirmenin hassas ölçümünün gerekli olduğu uygulamalarda bulunur. Bu sensörler, uygulamalarını dönüş hızının ölçülmesi gereken sistemlerde de bulur.
Bu sensörler benzersiz bir sözcük verir (bir sözcük bir bit kümesi) göre şu anki pozisyon sensörün.
Bu, artımlı döner kodlayıcılardan farklıdır, çünkü artımlı kodlayıcılar bir çıktı vermek üzere tasarlanmıştır. her yerde bulunan darbelerin sürekli akışı mutlak kodlayıcılar bir çıktı verirken her pozisyon için benzersiz bit seti sensörün.
Bu, ölçüm yapmamızı sağlar kesin (mutlak) konum şaftın hesaplanmasından ziyade pozisyon değişikliği.
Mutlak döner kodlayıcıların nasıl çalıştığına derinlemesine bir göz atalım.
Mutlak Döner Enkoder Çalışma Prensibi
Mutlak döner kodlayıcılar, artımlı döner kodlayıcılarla karşılaştırıldığında, operasyonda biraz karmaşıktır, ancak bir uygulamada kullanımı basittir.
Artımlı döner kodlayıcılara benzer şekilde, mutlak kodlayıcılar da sensöre bağlı bir döner şafta sahiptir. Mil, dikkatlice yerleştirilmiş bir dizi yuva ile bir diske bağlanmıştır. Bu çark aynı zamanda 'kod çarkı' olarak da bilinir.
Kod tekerinin benzersiz bir bit deseni vardır. Tüm yuvaların yinelenen bir düzende yerleştirildiği artımlı kodlayıcıların aksine, mutlak kodlayıcı kod çarkının yuvaları birbirinden farklıdır.
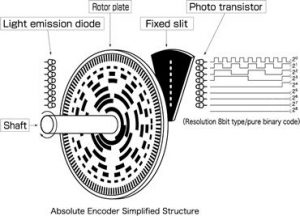
Mil döndüğünde, kod çarkı da onunla birlikte döner. Kod tekerine ışık huzmeleri yayan bir dizi LED vardır. Işık huzmeleri yuvalarla hizalandığında, huzmeler kod çarkından, sabit yarıktan geçer ve fototransistörleri aydınlatır.
LED dizisini manyetik algılama dizisiyle değiştiren manyetik mutlak kodlayıcılar ve optik işaretleyicilerin yerini alan bir dizi manyetik kutup vardır.
Her fototransistör bağımsız olarak çalışır ve aydınlatıldığında bir mantık YÜKSEK sinyali verir. Belirli bir fototransistörde ışın mevcut olmadığında, DÜŞÜK mantık çıkışı verir.
Kod tekerine kazınmış fototransistörlerin sayısı ve yuva seviyeleri, mutlak döner kodlayıcının doğruluğunu ve çözünürlüğünü belirler.
Bu genellikle şurada belirtilir: bit. Örneğin, 8 bit çözünürlüklü bir mutlak kodlayıcı, 256 konum bilgisi sağlayabilir ve 1.41 derecelik artışlarla açısal yer değiştirmeleri ölçebilir.
Mutlak enkoderin tipine ve yapısına bağlı olarak, birden fazla çıkış konfigürasyonu mevcuttur:
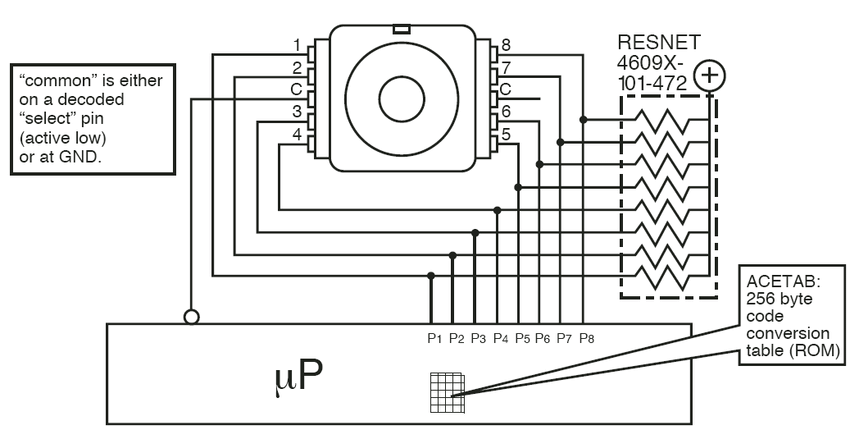
- Paralel çıkış
- Bu sensör tipi, konum bilgisi sağlayan birden fazla çıkış hattına sahiptir. Örneğin, 8 bitlik bir paralel çıkış sensörü, 8 sinyal hattına ve iki güç kaynağı kablosuna sahiptir. Çıktı şu şekilde kodlanabilir: ikili or gri kod biçimi.
- Paralel çıkış sensörleri, çok fazla işlem gerektirmediğinden çok az miktarda yerleşik devreye sahiptir.
- seri çıkış
- Seri çıkışlı mutlak enkoderler, senkron bir veri iletim protokolü aracılığıyla konum ve hız bilgilerini verir.
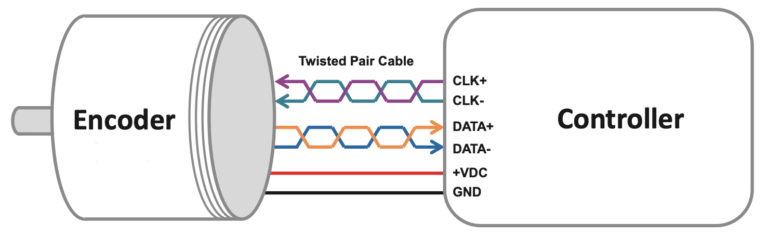
- Seri çıkış sensörleri, veri ve saat hatlarına sahiptir ve her saat darbesi başına bir bit verir. Bu sensörler ayrıca ikili veya gri kodlu çıktı biçimlerinde gelir.
- Ek gürültü bağışıklığı için, seri çıkış tipi sensörler, RS-422 standardı. Saat başına bir çift ve veri hatları için bir çift.
- Mutlak kodlayıcılar için en popüler senkron iletişim yöntemleri şunlardır: SSI: Senkron Seri Arayüz, BiSS: Çift Yönlü Senkron Seri Arayüz ve Hiperface DSL. gibi tescilli arayüzler de vardır. EnDat2.2.
- Analog çıkış
- Analog çıkış sensörleri, sensörün konumuna bağlı olarak bir voltaj veya akım değeri verir.
Mutlak Enkoderlerin Avantajları
Mutlak kodlayıcılar, maliyeti biraz daha yüksek olmasına rağmen, konum algılama açısından birçok avantaja sahiptir:
- Milin mutlak konumunu verir
- 'Sorgulandığında', mutlak kodlayıcılar, mevcut konumuyla ilgili benzersiz bir konum bilgisi verir. Bu, 360 derecelik bir dönüşte milin hiçbir iki konumunun aynı olmadığı anlamına gelir.
- Çoklu çıkış seçenekleri
- Mutlak kodlayıcıların birden çok çıkış türü vardır: paralel, seri (standart ve özel protokoller)
- Elektrik kesintilerine karşı bağışıklık
- Mutlak enkoderlerde elektrik kesintisi olmaz. Güç çevriminden hemen sonra konum bilgisi sağlamaya her zaman hazırdırlar.
- Yüksek çözünürlüklü
- Mutlak kodlayıcılar, yalnızca kodlayıcı izlerinin ve algılama birimlerinin sayısını artırarak, artımlı kodlayıcılardan çok daha yüksek çözünürlüğe sahip olabilir.
Artımlı ve Mutlak Kodlayıcılar
Mutlak ve artımlı kodlayıcılar arasındaki temel fark, işlemleridir. Mutlak kodlayıcılar, mil dönmediğinde bile konum bilgisi sağlayabilir.
Artımlı kodlayıcılar, yalnızca mil dönerken darbe sağlayabilir. Göreceli konumu ve mesafeyi belirlemek için ayrı bir nabız sayımı yapılmalıdır.
Şaftın başlangıç/referans konumunu belirlemek için artımlı enkoderler ayrı bir "homing" işaretçisine sahip olmalıdır. Ancak, mutlak enkoderler böyle bir ilaveye ihtiyaç duymazlar ve şaftı yuvalamak için hemen bir konum sağlayabilirler.
Bu, şaftın 'ana' konumunu elde etmek için döndürülmesinin istenmediği uygulamalarda çok yararlı olabilir.
Artımlı kodlayıcılar hız, konum ve mesafe bilgilerini elde etmek için özel yüksek hızlı kod çözücü modülleri gerektirir. Bu, PLC'ler ve mikrodenetleyiciler dışındaki elektronik cihazlarla entegrasyonu sınırlar. Bazen işlem yükü, sistemin performansını da olumsuz etkileyebilir.
Mutlak sensörler, artımlı muadillerinden daha yüksek bir genel çözünürlüğe sahiptir. Artımlı kodlayıcıların çözünürlüğü, diskin fiziksel boyutu ve sistemin frekans yanıtı ile sınırlıdır.
Mutlak kodlayıcılar her zaman talep üzerine konum bilgisi sağlamaya hazırdır, artımlı kodlayıcıların ise darbe katarını elde etmek ve mevcut hız, yön ve mesafeyi hesaplamak için sürekli olarak izlenmesi gerekir. Bu nedenle, mutlak enkoderler güç kesintilerinden kolayca kurtulabilir.
Mutlak Enkoder Uygulamaları
Mutlak kodlayıcılar esas olarak aşağıdakiler gibi yüksek hassasiyetli konumlandırma uygulamalarında kullanılır:
- Çok eksenli CNC tezgahları (montaj ve imalat)
- Robot kolları (cerrahi robotlar, tanısal görüntüleme)
- Asansörlerin konumlandırma sistemi
- Baskı uygulamaları
- Motor sporları endüstrisi (yönlendirme sistemleri) ve daha fazlası.
Mutlak Enkoder Çıkışı
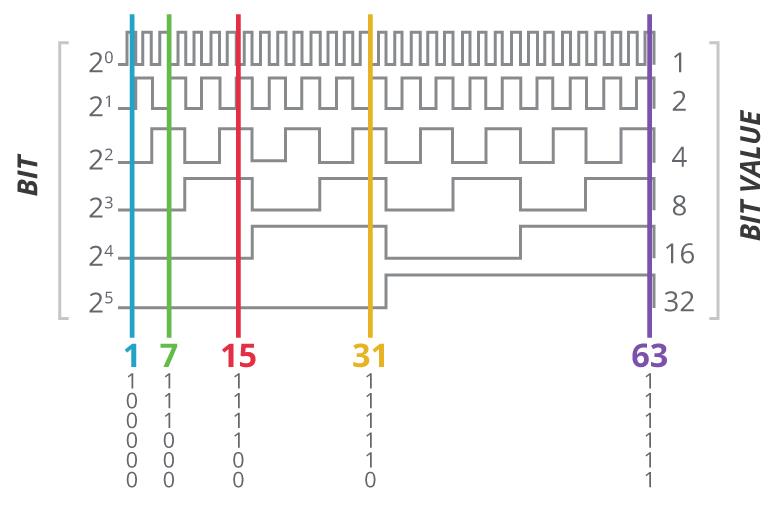
Mutlak kodlayıcılar, şaftın her konumu için 'bir kelime' adı verilen bir dizi bit verir. Mutlak kodlayıcılar için üç tür çıkış vardır: paralel, seri ve analog.
Paralel çıkış kodlayıcıları, kelimenin karşılık gelen bitlerini çıkaran n sayıda kabloya (n=bit sayısı (çözünürlük)) sahiptir. Aşağıda gösterilen şekil, 6 bitlik bir word mutlak kodlayıcı çıkışını gösterir. Çıkış kelimesi şunlardan biri olabilir: gri kod or ikili biçimi.
Seri çıkış kodlayıcıları, 'yoklandığında' bir veri akışı verir. Sensör, yerleşik bir mikro denetleyici tabanlı sinyal işleme devresine sahiptir. Desteklenen bir cihazın sensörle iletişim kurmasını sağlayan SSI, BiSS, EnDat, Modbus ve Profibus gibi seri bus sistemleri bulunmaktadır.
Analog çıkış sensörleri, sensörün konumuna bağlı olarak bir voltaj veya akım sinyali verir.
Mutlak Kodlayıcı Türleri
Mutlak kodlayıcılar, algılama teknolojisine göre şu şekilde kategorize edilebilir: optik ve manyetik. Optik kodlayıcılar görünür ışık (LED'ler) ve oluklu kod çarkı.
Manyetik kodlayıcılar manyetik kutuplar ve manyetik algılama dizisi kod tekerinin mevcut konumunu elde etmek için.
Diğer sınıflandırma çıktı tipine dayalıdır. Tek dönüşlü ve çok dönüşlü mutlak enkoderler vardır. Tek dönüşlü mutlak kodlayıcılar, yalnızca tek bir 260 derecelik dönüşte konumlandırma bilgisi sağlayabilir.
Çok turlu kodlayıcılar, milin döndüğü 360 derecelik dönüş sayısını sağlayan ek veriler sağlar. Bu, başlangıçtan beri saymak zorunda kalmadan dönüş sayısını belirlemeye yardımcı olur.
Tek dönüşlü ve Çok dönüşlü Mutlak Enkoderler
Devirleri saymak için özel bir fonksiyonun mevcudiyetine bağlı olarak, iki tür mutlak kodlayıcı vardır: Tek dönüşlü ve Çok dönüşlü mutlak enkoderler.
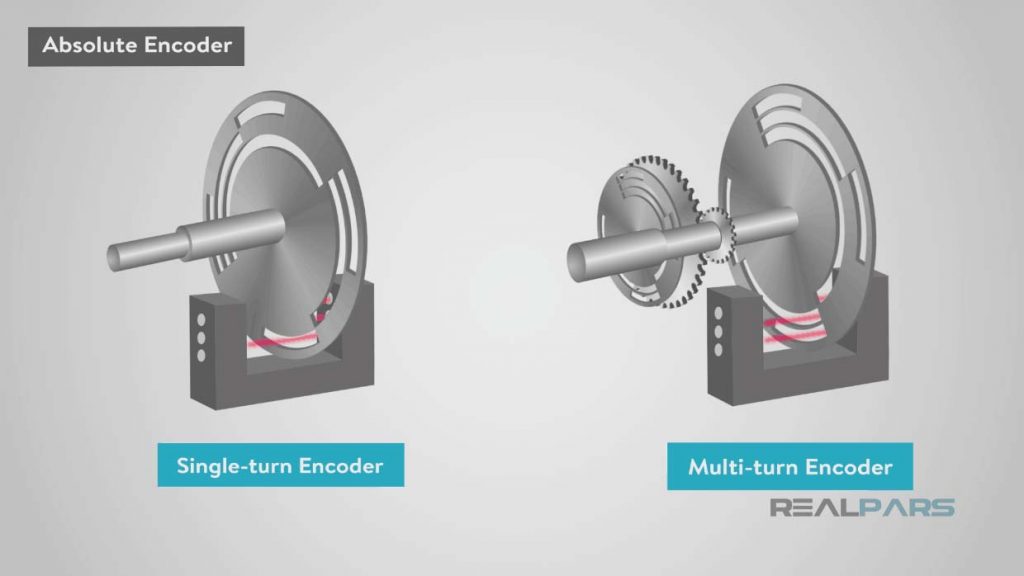
Tek dönüşlü mutlak enkoderler, konumu bir dönüş içinde ölçebilir.
Örneğin, tek dönüşlü bir mutlak kodlayıcı başlangıç konumundan 360 derece dönerse ve 361. dönüş derecesine ulaşırsa, sensör çıkışı en baştan başlatacaktır. Konumu 1 derece olarak gösterecektir.
Bu sensörler, dönüş tam bir devri aştığında sayamaz veya özel bir sinyal sağlayamaz. Örneğin, Allen Bradley'den 845G serisi sensörler minimum olarak 12 ve maksimum konum olarak 0 olmak üzere 4095 bit çıkışa sahiptir. 4096'ya ulaştığında, çıktı 0'a ulaşır.
Tek dönüşlü mutlak enkoderler aşağıdaki gibi uygulamalarda bulunur:
- Teleskoplar
- Döner Antenler
- Rüzgar Türbini Jeneratörleri
- Kapılar/Kapılar
Tek dönüşlü enkoderler yalnızca devir sayma özelliğinden yoksundur ve hız ve konum ölçümleri için kullanılabilir. Gerekirse, başlangıç konumu referans olarak kullanılabilir ve yaklaşık devir sayısını saymak için yazılım yöntemi kullanılabilir.
Çok turlu mutlak enkoderler ise devirleri de sayabilir. Örneğin, 12 bitlik çok dönüşlü bir mutlak kodlayıcı, devir başına 4096 adıma sahiptir ve ayrıca 4096 devir sayabilir. Çok turlu kodlayıcılar, devir sayısını korumak için aşağıdaki teknolojilerden birini kullanır:
- dişli tip
- Dişli kodlayıcılar, devir sayısını izlemek için bir dizi planet dişli kullanır. Bu tiplerin zamanla mekanik aşınma gibi bir dezavantajı vardır.
- Pil yedekleme tipi
- Bu tip, sayaç bilgilerini depolamak için bir elektronik sayaç ve bir bellek kullanır. Güç kapalıyken bile devirleri sayabilirler. Ancak çoğu durumda pil sensörde yerleşiktir. Kullanım sıklığına bağlı olarak zaman zaman değiştirilmesi gerekebilir.
- Wiegand sensör tipi
- Wiegand-tel tipi sensörler, şaftın yanına sarılmış özel bir tel kullanır ve polaritede bir değişikliği tetiklemek için manyetik bir darbe kullanır. Bu değişiklik, tamamlanan her devirden sonra gerçekleşir. Bu anahtarlama, devir sayısını saymak için kullanılır.
Çok turlu enkoderler, aşağıdaki gibi uygulamalarda bulunur:
- Robotik eklemler
- vinçler
- Servo Motorlar (360 servo)
- Uydu çanağı kontrol sistemleri ve bir dönüş pivot noktasının erişilemediği/mevcut olmadığı çok daha fazlası.
Manyetik Mutlak Enkoder nedir?
Manyetik mutlak kodlayıcılar, optik kodlayıcılarda bulunan LED'ler ve fotodiyotlar yerine manyetik kutuplar ve manyetik sensörler kullanır. Aşağıdaki resim, mutlak kodlu bir manyetik kodlayıcı tekerleğinin bir örneğini göstermektedir.
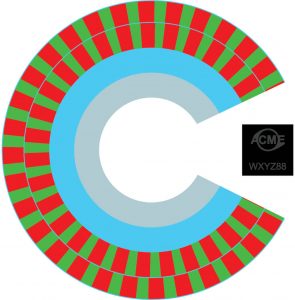
Dış kutup düzenlemesi, iç düzenlemeden bir fazla manyetik kutba sahiptir. Bu, iç ve dış kutup çiftlerinin benzersiz şekilde dengelenmesine neden olur.
Sensörler, her seferinde tekerlek başına bir kutuptan sinyal alır ve faz farklarını (faz kayması) hesaplar. Bu analog faz farkı daha sonra çıkış için dijital bir değere dönüştürülür.
Manyetik kodlayıcılar çok sağlamdır ve şok ve titreşime karşı dayanıklıdır.
Uygulamalarını toz, nem ve diğer malzeme parçacıkları gibi partikül kirleticilerin birikebileceği ortamlarda bulurlar. Ancak, çalışma prensipleri nedeniyle manyetik kodlayıcılar, güçlü manyetik alanların neden olduğu bozulmalara karşı hassastır.
Raspberry Pi ile Mutlak Kodlayıcı Arayüz Oluşturma
Mutlak bir enkoderi Raspberry Pi ile bağlamak basit olabilirken, girişleri düzgün okuma programı sensör tipine bağlı olarak biraz karmaşık hale gelebilir. Seri çıkış tipi bir mutlak kodlayıcının nasıl arayüzleneceğine bir göz atalım (EMS22A) bir Ahududu Pi ile.
Sensörün kablolanması
Sensör aşağıdaki kablolama formatına sahiptir:
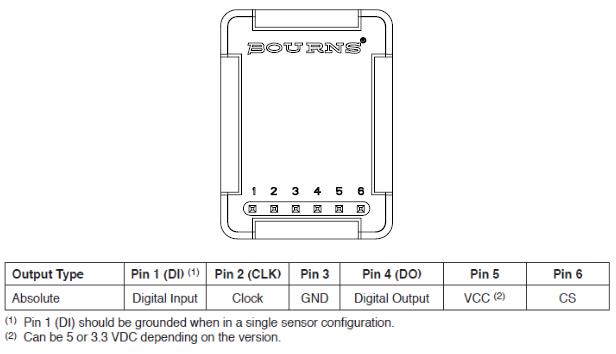
Raspberry Pi ile sensörün kablolarını aşağıdaki gibi bağlayın:
- Pin 2 (CLK) -> RPi pin 2
- Pin 4 (DO) -> RPi pin 3 (birden fazla sensör kullanılıyorsa, ikinci sensörün veri pinini pin 14'e bağlayın)
- Pin 6 (CS) -> RPi pin 4
- VCC -> RPi +5V pin
- GND -> RPi GND pini
Örnek Kod
Bilgileri sensörden sorgulamak için aşağıdaki örnek kod HareshKarnan kullanılabilir. Yürütüldüğünde bağlı sensörden gelen okumaları yazdıracaktır.
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
PIN_CLK = 2
PIN_DAT = [3,14]
PIN_CS = 4
delay = 0.0000005
ns = 2 # number of sensors attached
# totally 10 bits to be extracted from SSI signal
bitcount = 16
# pin setup done here
try:
GPIO.setup(PIN_CLK,GPIO.OUT)
GPIO.setup(PIN_DAT[:],GPIO.IN)
GPIO.setup(PIN_CS,GPIO.OUT)
GPIO.output(PIN_CS,1)
GPIO.output(PIN_CLK,1)
except:
print "ERROR. Unable to setup the configuration requested"
#wait some time to start
time.sleep(0.5)
print "GPIO configuration enabled"
def clockup():
GPIO.output(PIN_CLK,1)
def clockdown():
GPIO.output(PIN_CLK,0)
def MSB():
# Most Significant Bit
clockdown()
def readpos():
GPIO.output(PIN_CS,0)
time.sleep(delay*2)
MSB()
data = [0]*ns
for i in range(0,bitcount):
if i<10:
#print i
clockup()
for j in range(0,ns):
data[j]<<=1
data[j]|=GPIO.input(PIN_DAT[j])
clockdown()
else:
for k in range(0,6):
clockup()
clockdown()
GPIO.output(PIN_CS,1)
return data
try:
while(1):
print readpos()
time.sleep(0.001)
#break
finally:
print "cleaning up GPIO"
GPIO.cleanup()
Mutlak Enkoder Fiyatı
Mutlak döner kodlayıcı fiyatları 10-15$ ile 1000$ arasında değişmektedir. Bunun başlıca nedeni mevcut özellikler, çözünürlük, çıktı türü ve kullanılan protokoldür. Tescilli, yüksek çözünürlüklü sensörler, daha düşük bir maliyetle satın alınabilen basit, paralel çıkış tipi sensörlerden daha pahalıya mal olur.
Sonuç
Döner kodlayıcılar, miller ve çubuklar gibi dönen mekanik bileşenleri takip etmek için kullanılır. Mutlak kodlayıcılar ve artımlı kodlayıcılar, iki tür döner kodlayıcıdır.
Döner enkoderin ham girişini okuyabilen ve hız, konum ve mesafe bilgilerini bilgisayara aktarabilen özel enkoder arayüz cihazları bulunmaktadır.
Desteklenen kodlayıcılar, ham değerleri elde etmek ve yazılım içinde hesaplamalar yapmak için doğrudan PLC'lere ve diğer bilgisayarlara bağlanabilir.

