Энкодер - это электромеханическое устройство, используемое для контроля вращающихся объектов, таких как валы и оси. Датчики вращения могут использоваться для измерения положения, расстояния и угловой скорости вращающегося вала.
Есть два типа поворотных энкодеров: инкрементальные поворотные энкодеры и абсолютные угловые энкодеры. В этой статье мы рассмотрим абсолютные угловые энкодеры, принцип их работы и применение.
Что такое абсолютный поворотный энкодер?
Абсолютные угловые энкодеры относятся к семейству поворотные энкодеры. Они используются для измерения следующих параметров вращающихся объектов, таких как валы или оси:
- Угловая скорость
- Информация о позиции
- Расстояние

Абсолютные угловые энкодеры используются в приложениях, где требуется точное измерение положения и углового смещения. Эти датчики также находят свое применение в системах, где необходимо измерять скорость вращения.
Эти датчики выдают уникальное слово (слово - это набор битв соответствии с текущая позиция датчика.
Это отличается от инкрементальных поворотных энкодеров, поскольку инкрементальные энкодеры предназначены для вывода непрерывный поток повсеместных импульсов в то время как абсолютные энкодеры выводят уникальный набор бит для каждой позиции датчика.
Это позволяет нам измерить точное (абсолютное) положение вала, а не рассчитывать смена позиции.
Давайте подробно рассмотрим, как работают абсолютные угловые энкодеры.
Принцип работы абсолютного поворотного энкодера
Абсолютные угловые энкодеры по сравнению с инкрементальными угловыми энкодерами несколько сложны в эксплуатации, но просты в применении.
Подобно инкрементальным угловым энкодерам, абсолютные энкодеры также имеют вращающийся вал, прикрепленный к датчику. Вал соединяется с диском с тщательно размещенным набором пазов. Это колесо также известно как «кодовое колесо».
Колесо кодирования имеет уникальный битовый шаблон. В отличие от инкрементальных кодировщиков, где все слоты размещены в повторяющемся шаблоне, слоты кодового колеса абсолютного кодировщика отличаются друг от друга.
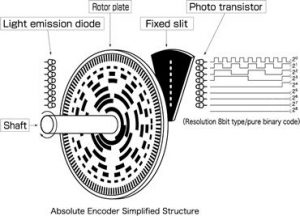
Когда вал вращается, кодовое колесо также вращается вместе с ним. Есть набор светодиодов, которые излучают лучи света на кодовое колесо. Когда лучи света совпадают с прорезями, лучи проходят через кодовое колесо, фиксированную прорезь, и освещают фототранзисторы.
Существуют магнитные абсолютные энкодеры, которые заменяют светодиодную матрицу на магнитную чувствительную матрицу и набор магнитных полюсов, заменяющих оптические маркеры.
Каждый фототранзистор работает независимо и при включении выдает логический ВЫСОКИЙ сигнал. Когда на конкретном фототранзисторе нет луча, он выдает логический низкий уровень.
Количество фототранзисторов и уровней прорезей, выгравированных на кодовом колесе, определяет точность и разрешение абсолютного углового энкодера.
Обычно об этом говорится в биты. Например, абсолютный энкодер с разрешением 8 бит может предоставить информацию о 256 положениях и может измерять угловые смещения с шагом 1.41 градуса.
В зависимости от типа абсолютного энкодера и его конструкции доступны несколько конфигураций выходов:
- Параллельный выход
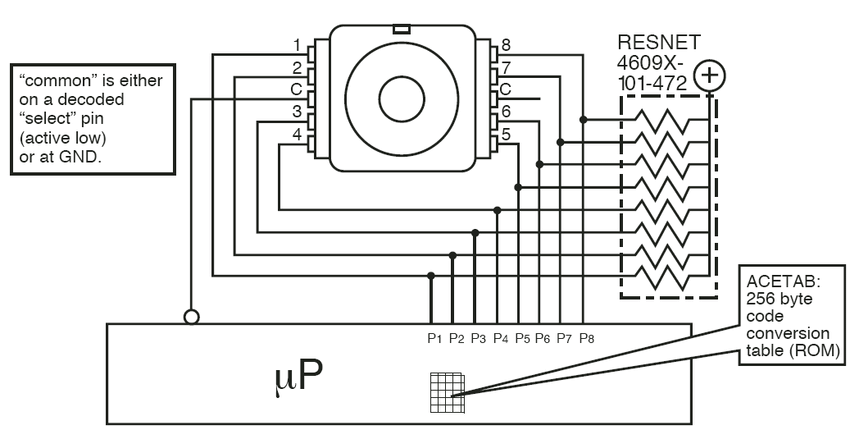
- Этот тип датчика имеет несколько выходных линий, которые предоставляют информацию о местоположении. Например, 8-битный датчик с параллельным выходом имеет 8 сигнальных линий и два провода питания. Вывод может быть закодирован в двоичный or серый код формат.
- Датчики с параллельным выходом имеют минимальное количество встроенных схем, так как не требуют большой обработки.
- Последовательный выход
- Абсолютные энкодеры с последовательным выходом выводят информацию о положении и скорости через протокол синхронной передачи данных.
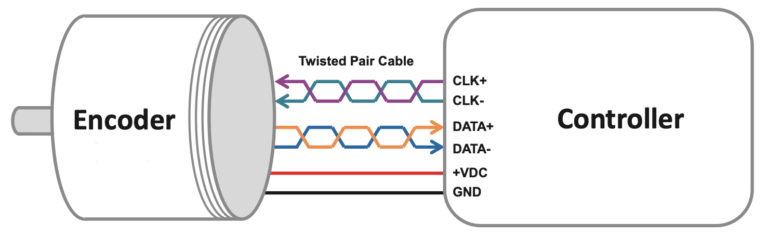
- Датчики с последовательным выходом имеют линии данных и тактовых импульсов и выводят один бит на каждый тактовый импульс. Эти датчики также бывают в двоичном формате или в выходном формате с серым кодом.
- Для дополнительной помехоустойчивости датчики с последовательным выходом используют связь по дифференциальной паре в соответствии с Стандарт RS-422. Одна пара на такт и другая для линий данных.
- Наиболее популярные методы синхронной связи для абсолютных энкодеров: SSI: синхронный последовательный интерфейс, BiSS: двунаправленный синхронный последовательный интерфейс и Hiperface DSL. Также есть проприетарные интерфейсы, такие как ЭнДат2.2.
- Аналоговый вывод
- Датчики с аналоговым выходом выдают значение напряжения или тока в зависимости от положения датчика.
Преимущества абсолютных энкодеров
Абсолютные энкодеры, хотя и стоят немного дороже, имеют несколько преимуществ с точки зрения определения положения:
- Выводит абсолютное положение вала.
- При "опросе" абсолютные энкодеры выводят уникальную информацию о положении, относящуюся к его текущему положению. Это означает, что никакие два положения вала при вращении на 360 градусов не совпадают.
- Несколько вариантов вывода
- Абсолютные энкодеры имеют несколько типов вывода: параллельный, последовательный (стандартные и проприетарные протоколы)
- Невосприимчивость к сбоям питания
- Абсолютные энкодеры не страдают от сбоев питания. Они всегда готовы предоставить информацию о местоположении сразу после отключения питания.
- Высокая разрешающая способность
- Путем простого увеличения количества дорожек энкодера и датчиков абсолютные энкодеры могут иметь гораздо более высокое разрешение, чем инкрементальные энкодеры.
Инкрементальные и абсолютные энкодеры
Основное различие между абсолютным и инкрементным энкодерами заключается в их работе. Абсолютные энкодеры могут предоставлять информацию о положении, даже если вал не вращается.
Инкрементальные энкодеры могут выдавать импульсы только при вращении вала. Для определения относительного положения и расстояния необходимо провести отдельный подсчет импульсов.
Инкрементальные энкодеры должны иметь отдельный маркер «начала отсчета» для определения исходного / исходного положения вала. Однако абсолютные энкодеры не нуждаются в таком добавлении и могут обеспечить немедленное положение вала.
Это может быть очень полезно в тех случаях, когда вращение вала для достижения «исходного» положения нежелательно.
Для инкрементальных энкодеров требуются специальные модули высокоскоростных декодеров для получения информации о скорости, положении и расстоянии. Это ограничивает интеграцию с электронными устройствами, отличными от ПЛК и микроконтроллеров. Иногда накладные расходы на обработку также могут отрицательно сказаться на производительности системы.
Абсолютные датчики имеют более высокое общее разрешение, чем инкрементные аналоги. Разрешение инкрементальных энкодеров ограничено физическим размером диска и частотной характеристикой системы.
Абсолютные энкодеры всегда готовы предоставить информацию о положении по запросу, в то время как инкрементальные энкодеры необходимо постоянно контролировать, чтобы получить последовательность импульсов и вычислить текущую скорость, направление и расстояние. Благодаря этому абсолютные энкодеры могут легко восстанавливаться после сбоев питания.
Абсолютные энкодеры
Абсолютные энкодеры в основном используются в приложениях высокоточного позиционирования, таких как,
- Многоосные станки с ЧПУ (сборка и изготовление)
- Роботы-манипуляторы (хирургические роботы, диагностическая визуализация)
- Система позиционирования лифтов
- Приложения для печати
- Индустрия автоспорта (электронные системы управления) и многое другое.
Абсолютный выход энкодера
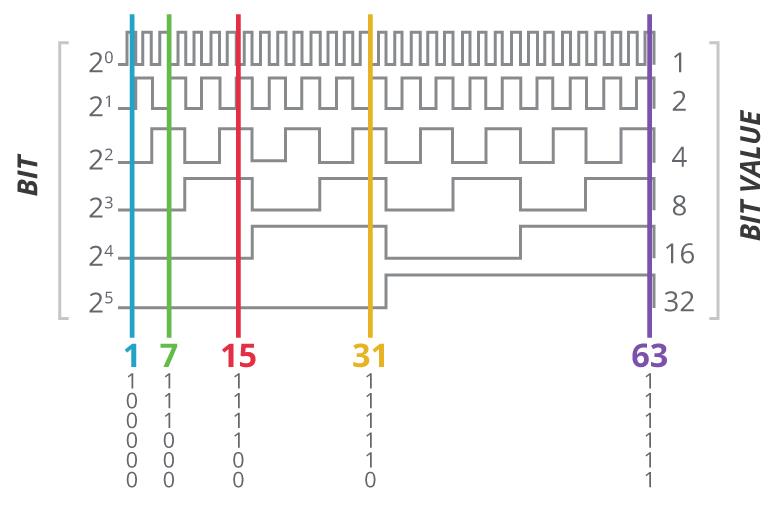
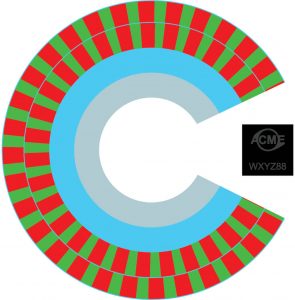
Абсолютные энкодеры выводят набор битов, называемых «словом» для каждого положения вала. Есть три типа выходов для абсолютных энкодеров: параллельный, последовательный и аналоговый.
Энкодеры с параллельным выходом имеют n-количество проводов (n = количество бит (разрешение)), выводящих соответствующие биты слова. На приведенном ниже рисунке показан выход абсолютного энкодера с 6-битным словом. Выходное слово может быть серый код or двоичный формат.
Кодеры последовательного вывода выводят поток данных при "опросе". Датчик имеет встроенную схему обработки сигналов на базе микроконтроллера. Существуют системы последовательной шины, такие как SSI, BiSS, EnDat, Modbus и Profibus, которые позволяют поддерживаемому устройству связываться с датчиком.
Датчики с аналоговым выходом выдают сигнал напряжения или тока в зависимости от положения датчика.
Типы абсолютных энкодеров
Абсолютные энкодеры можно классифицировать на основе сенсорной технологии как оптический и магнитный. Оптические кодировщики используют видимый свет (светодиоды) и кодовое колесо с прорезями.
Магнитные энкодеры используют магнитные полюса и еще один магнитная сенсорная матрица чтобы получить текущую позицию колеса кодирования.
Другая классификация основана на типе вывода. Есть однооборотные и многооборотные абсолютные энкодеры. Однооборотные абсолютные энкодеры могут предоставлять информацию о местоположении только за один поворот на 260 градусов.
Многооборотные энкодеры предоставляют дополнительные данные о количестве оборотов вала на 360 градусов. Это помогает определить количество оборотов без необходимости считать с самого начала.
Однооборотные и многооборотные абсолютные энкодеры
В зависимости от наличия специальной функции для подсчета оборотов существует два типа абсолютных энкодеров: Однооборотные и многооборотные абсолютные энкодеры.
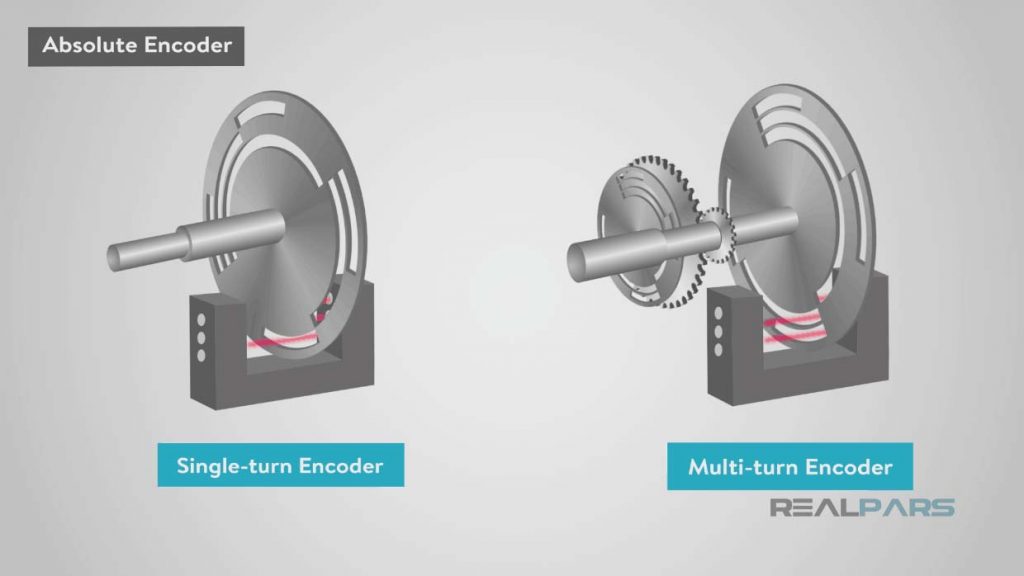
Однооборотные абсолютные энкодеры могут измерять положение за один оборот.
Например, если однооборотный абсолютный энкодер поворачивается на 360 градусов от своего исходного положения и достигает 361-го градуса вращения, датчик начнет вывод данных с начала. Он укажет положение как 1 градус.
Эти датчики не могут подсчитывать или выдавать специальный сигнал, когда вращение превышает полный оборот. Например, Датчики серии 845G от Аллена Брэдли иметь 12-битный вывод, 0 как минимум и 4095 как максимальное положение. Как только он достигает 4096, выход достигает 0.
Однооборотные абсолютные энкодеры используются в таких приложениях, как:
- Телескопы
- Вращающиеся антенны
- Генераторы ветряных турбин
- Ворота / Двери
В однооборотных энкодерах отсутствует функция подсчета оборотов, и их можно использовать для измерения скорости и положения. При необходимости исходное положение можно использовать в качестве ориентира, а программный метод можно использовать для подсчета приблизительного количества оборотов.
С другой стороны, многооборотные абсолютные энкодеры также могут считать обороты. Например, 12-битный многооборотный абсолютный энкодер имеет 4096 шагов на оборот, а также может считать 4096 оборотов. В многооборотных энкодерах используется одна из следующих технологий для сохранения числа оборотов:
- Тип редуктора
- Энкодеры с редуктором используют набор планетарных шестерен для отслеживания количества оборотов. Недостатком этих типов является механический износ со временем.
- Тип резервного аккумулятора
- Этот тип использует электронный счетчик и память для хранения информации счетчика. Они могут считать обороты даже в выключенном состоянии. Однако в большинстве случаев аккумулятор встроен в датчик. Время от времени может потребоваться его замена, в зависимости от частоты использования.
- Тип датчика Wiegand
- Виганд-проволочные датчики используют специальный провод, намотанный рядом с валом, и используют магнитный импульс, чтобы вызвать изменение полярности. Это изменение происходит после каждого завершенного оборота. Это переключение используется для подсчета количества оборотов.
Многооборотные энкодеры используются в таких приложениях, как,
- Роботизированные суставы
- Краны
- Сервомоторы (360 сервоприводов)
- Системы управления спутниковыми антеннами и многое другое, где точка поворота недоступна / недоступна.
Что такое магнитный абсолютный энкодер?
В магнитных абсолютных энкодерах используются магнитные полюса и магнитные датчики вместо светодиодов и фотодиодов, используемых в оптических энкодерах. На изображении ниже показан пример колеса магнитного кодировщика с абсолютным кодом.
Устройство внешнего полюса имеет на один магнитный полюс больше, чем внутреннее устройство. Это приводит к однозначному смещению внутренней и внешней пар полюсов.
Датчики принимают сигналы от одного полюса на колесо за раз и вычисляют их разность фаз (фазовый сдвиг). Эта аналоговая разность фаз затем преобразуется в цифровое значение для вывода.
Магнитные энкодеры очень прочны и устойчивы к ударам и вибрации.
Они находят свое применение в средах, где могут накапливаться твердые загрязнители, такие как пыль, влага и другие частицы материала. Однако из-за своего принципа действия магнитные энкодеры чувствительны к сбоям, вызванным сильными магнитными полями.
Взаимодействие абсолютного кодировщика с Raspberry Pi
Хотя подключение абсолютного энкодера к Raspberry Pi может быть простым, программа для правильного чтения входов может немного усложниться в зависимости от типа датчика. Давайте посмотрим, как взаимодействовать с абсолютным энкодером с последовательным выходом (ЭМС22А) с Raspberry Pi.
Подключение датчика
Датчик имеет следующий формат подключения:
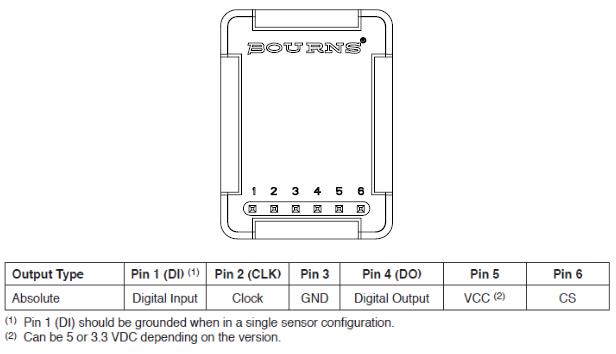
Подключите провода датчика к Raspberry Pi следующим образом:
- Контакт 2 (CLK) -> контакт 2 RPi
- Контакт 4 (DO) -> контакт 3 RPi (при использовании более одного датчика подключите контакт данных второго датчика к контакту 14)
- Контакт 6 (CS) -> контакт 4 RPi
- VCC -> контакт RPi + 5V
- GND -> контакт RPi GND
Пример кода
Чтобы получить информацию от датчика, следующий пример кода, написанный ХарешКарнан может быть использован. При выполнении он распечатает показания подключенного датчика.
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
PIN_CLK = 2
PIN_DAT = [3,14]
PIN_CS = 4
delay = 0.0000005
ns = 2 # number of sensors attached
# totally 10 bits to be extracted from SSI signal
bitcount = 16
# pin setup done here
try:
GPIO.setup(PIN_CLK,GPIO.OUT)
GPIO.setup(PIN_DAT[:],GPIO.IN)
GPIO.setup(PIN_CS,GPIO.OUT)
GPIO.output(PIN_CS,1)
GPIO.output(PIN_CLK,1)
except:
print "ERROR. Unable to setup the configuration requested"
#wait some time to start
time.sleep(0.5)
print "GPIO configuration enabled"
def clockup():
GPIO.output(PIN_CLK,1)
def clockdown():
GPIO.output(PIN_CLK,0)
def MSB():
# Most Significant Bit
clockdown()
def readpos():
GPIO.output(PIN_CS,0)
time.sleep(delay*2)
MSB()
data = [0]*ns
for i in range(0,bitcount):
if i<10:
#print i
clockup()
for j in range(0,ns):
data[j]<<=1
data[j]|=GPIO.input(PIN_DAT[j])
clockdown()
else:
for k in range(0,6):
clockup()
clockdown()
GPIO.output(PIN_CS,1)
return data
try:
while(1):
print readpos()
time.sleep(0.001)
#break
finally:
print "cleaning up GPIO"
GPIO.cleanup()
Цена абсолютного кодировщика
Стоимость абсолютных энкодеров колеблется от 10-15 до 1000 долларов. В основном это связано с доступными функциями, разрешением, типом вывода и используемым протоколом. Запатентованные датчики с высоким разрешением обычно стоят дороже, чем простые датчики с параллельным выходом, которые можно купить по более низкой цене.
Заключение
Датчики вращения используются для отслеживания вращающихся механических компонентов, таких как валы и стержни. Абсолютные энкодеры и инкрементальные энкодеры - это два типа угловых энкодеров.
Существуют специальные устройства интерфейса энкодера, которые могут считывать необработанные входные данные углового энкодера и выводить информацию о скорости, положении и расстоянии на компьютер.
Поддерживаемые кодировщики также могут быть напрямую подключены к ПЛК и другим компьютерам для получения необработанных значений и выполнения расчетов в программном обеспечении.

