Introdução
As aplicações de automação industrial freqüentemente precisam da detecção de objetos. Existem muitos tipos de sensores projetados para detectar a presença de objetos feitos de quase qualquer material.
Sensores de efeito Hall são especialmente projetados para detectar objetos magnéticos. Eles são freqüentemente encontrados em aplicações de medição de velocidade / posição.
O que é um sensor de proximidade de efeito Hall?
Sensores de efeito Hall pertencer à família de sensores de proximidade. Eles detectam a presença usando a magnitude do campo magnético criado por um objeto. O princípio de efeito de Hall é usado para detectar a presença e intensidade de um campo magnético.

Os sensores de efeito Hall podem detectar qualquer objeto magnético que tenha a polaridade correta e força suficiente. Isso inclui eletroímãs e ímãs permanentes como Neodímio ímãs.
Os sensores Hall são usados em aplicações de detecção de posição, proximidade e velocidade. Por exemplo, os automóveis modernos usam sensores de efeito Hall para calcular a velocidade do veículo, a posição do virabrequim do motor e a velocidade.
Um dos sistemas mais populares que usam sensores de efeito Hall é o Freio Antibloqueio (ABS) sistemas em veículos. Em aplicações de automação, os sensores Hall encontram seus usos em Controle motor e até mesmo Detecção de corrente DC.
Como funciona um sensor de proximidade de efeito Hall?
Os sensores de efeito Hall consistem principalmente de um pedaço fino de semicondutor retangular. O semicondutor é geralmente feito de arsenieto de gálio (GaAs), arsenieto de índio (InAs) ou antimoneto de índio (InSb).
Uma corrente contínua pode passar por este condutor o tempo todo. Quando um ímã é colocado perto desse semicondutor fino, ele interrompe o fluxo de corrente desviando os portadores de carga no semicondutor.
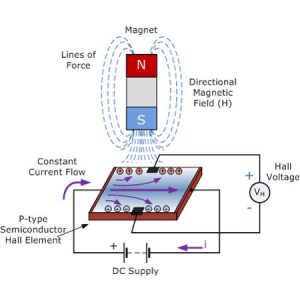
Este fenômeno faz com que uma diferença de tensão se acumule, perpendicular ao fluxo da corrente e através do semicondutor. Isso é mostrado na imagem acima como cargas positivas e negativas.
Esta tensão é chamada Tensão Hall, nomeado após o físico Salão Edwin Herbert quem o descobriu. Para gerar uma diferença de tensão mensurável, o ímã deve ser:
- As linhas de fluxo magnético devem ser perpendiculares
- O pólo em direção ao sensor deve ter a polaridade correta. Este é frequentemente o pólo Sul do ímã.
Um sensor de efeito Hall típico tem o seguinte diagrama de blocos, que representa a funcionalidade de seu circuito.
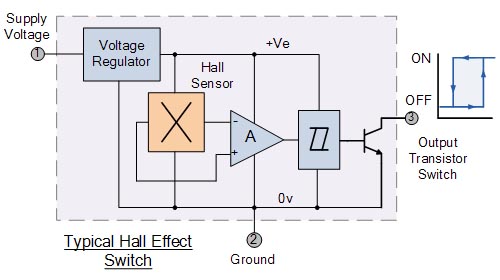
O regulador de tensão fornece uma tensão estável e suave para o sensor, o amplificador e outros componentes.
Quando um objeto magnético é colocado próximo ao sensor, a tensão Hall aumenta. O amplificador amplifica essa diferença para alimentar o gatilho schmitt para fornecer uma saída limpa e sem jitter.
Quando o sinal amplificado excede um certo limite, o gatilho schmitt é ativado. O sinal do gatilho schmitt ativa o transistor.
O transistor funciona como dispositivo de chaveamento de saída, que liga ou desliga a saída. O componente do estágio de saída depende do tipo de saída do sensor.
Pode ser um transistor (NPN / PNP), um relé ou mesmo o sinal analógico bruto que representa a força do campo magnético.
Quais são os tipos de sensores de efeito Hall?
Os sensores de efeito Hall podem ser categorizados de várias maneiras.
- Sensores de efeito Hall bipolares e unipolares
- Os sensores bipolares também são conhecidos como tipos de 'travamento'. Suas saídas são ativadas quando um campo magnético positivo (pólo sul) está presente. Para desligar / liberar a saída, um campo negativo (pólo norte) deve ser aplicado.
- Os sensores unipolares ligam a saída quando um pólo sul magnético está presente e desligam sua saída quando o ímã é removido.
- Saídas digitais e analógicas
- Os sensores de tipo de saída digital geram uma saída lógica distinta ALTA ou BAIXA, enquanto os sensores analógicos geram uma faixa de valores como 0-5 V ou 4-20 mA.
Qual é o alcance de um sensor de efeito Hall?
Os sensores Hall têm uma faixa operacional típica de cerca de 0-40mm. No entanto, isso também depende diretamente da densidade do fluxo magnético do objeto.
Ímãs mais fortes têm mais influência e podem acionar o sensor a uma distância relativamente maior. Ímãs mais fracos devem ser colocados muito perto do sensor para acioná-lo.
Qual é a diferença entre um sensor Hall e um sensor indutivo?
A principal diferença entre esses dois sensores é a maneira como eles detectam objetos. Sensores de proximidade indutivos geram seu próprio campo magnético e monitoram a mudança do campo para detectar objetos.
Isso significa que o sensor monitora o mudança em seu próprio campo magnético por objetos externos.
Sensores de efeito Hall monitoram campos magnéticos externos. Eles exigem que o objeto detectado crie seu próprio campo magnético. Portanto, os sensores de efeito Hall só podem detectar ímãs permanentes e eletroímãs.
Sensores de proximidade indutivos podem detectar muitos tipos de metais como ferro, cobre e alumínio.
Sensores de proximidade de efeito Hall são suscetíveis a interferência magnética. Sensores de proximidade indutivos são relativamente tolerantes a essas interferências. No entanto, o desempenho de ambos os sensores pode ser afetado por temperaturas extremas e acúmulo de chips.
Ao considerar a complexidade da instalação, os sensores indutivos são relativamente mais fáceis de instalar porque podem usar parte da máquina como um objeto de detecção (ou seja, detecção de limite).
Os sensores Hall requerem um acessório magnético especial a ser conectado à máquina, diferente do próprio sensor (ou seja, sensor de velocidade da roda).
Como usar um sensor de efeito Hall com Arduino
Semelhante aos sensores de proximidade industriais, existem versões em miniatura deles disponíveis no mercado. Os US5881 / US1881 são alguns dos sensores de efeito Hall populares que são compatíveis com 5V.
Isso significa que podemos integrá-los facilmente com um Arduino para detectar objetos magnéticos.
A imagem abaixo mostra a fiação típica de um US1881 para um arduino. O resistor de 10k atua como um resistor pull-up para fornecer uma entrada estável ao Arduino quando nenhum objeto for detectado.
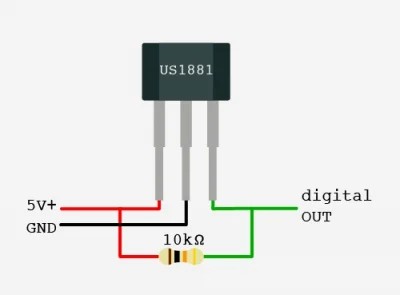
O pino de saída do US1881 pode ser conectado a qualquer pino digital do Arduino. Se o sensor for usado para medir a velocidade de uma roda, usar um pino que suporte interrupções externas pode ser benéfico.
Neste exemplo, a saída do sensor Hall é conectada ao pino 2 do Arduino Uno.
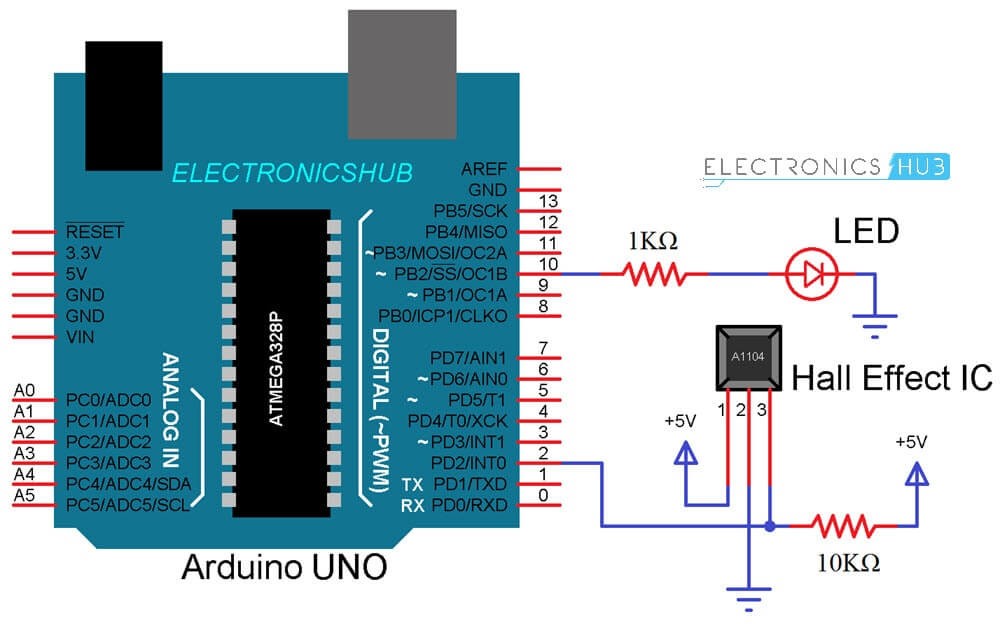
| const int ledPin = 10; const int hallPin = 2; anular instalação() { pinMode (ledPin, OUTPUT); pinMode (hallPin, INPUT); } anular laço() { if(digitalRead (hallPin) == LOW) { digitalWrite (ledPin, HIGH); } outro { digitalWrite (ledPin, LOW); } } |
Este Arduino monitora constantemente o estado da saída do sensor Hall. Quando um ímã é colocado perto do sensor, ele emite um sinal lógico BAIXO.
O Arduino monitora isso e se o sinal estiver BAIXO, ele liga o LED. Quando não há ímã presente, a saída do sensor Hall é lógica HIGH. Observando isso, o Arduino desliga o LED.
Conclusão
Neste artigo, discutimos o que são sensores de proximidade de efeito Hall, como funcionam e suas aplicações. Sensores de efeito Hall são extremamente úteis em aplicações de alta velocidade, como detecção de velocidade.
Dependendo da aplicação, também pode haver alternativas melhores, como sensores de proximidade indutivos, ópticos ou capacitivos.

