Um codificador rotativo é um dispositivo eletromecânico usado para monitorar objetos rotativos como eixos e eixos. Codificadores rotativos podem ser usados para medir a posição, distância e velocidade angular do eixo rotativo.
Existem dois tipos de codificadores rotativos: codificadores rotativos incrementais e codificadores rotativos absolutos. Neste artigo, veremos codificadores rotativos absolutos, seu princípio de funcionamento e aplicações.
O que é um Codificador Rotativo Absoluto?
Os codificadores rotativos absolutos pertencem à família dos codificadores rotativos. Eles são usados para medir os seguintes parâmetros de objetos rotativos, como eixos ou eixos:
- Velocidade angular
- Informação de posição
- Distância

Os encoders rotativos absolutos são encontrados em aplicações onde a medição precisa da posição e do deslocamento angular é necessária. Esses sensores também encontram suas aplicações em sistemas onde a velocidade de rotação deve ser medida.
Esses sensores geram uma palavra única (uma palavra é um conjunto de bits) de acordo com posição atual do sensor.
Isso é diferente dos codificadores rotativos incrementais, pois os codificadores incrementais são projetados para produzir um fluxo contínuo de pulsos onipresentes enquanto os codificadores absolutos geram um conjunto único de bits por cada posição do sensor.
Isso nos permite medir o posição exata (absoluta) do eixo, em vez de calcular o mudança de posição.
Vamos dar uma olhada em como os codificadores rotativos absolutos funcionam.
Princípio de funcionamento do codificador rotativo absoluto
Os codificadores rotativos absolutos, quando comparados com os codificadores rotativos incrementais, são um tanto complexos em operação, mas simples de usar em uma aplicação.
Semelhante aos codificadores rotativos incrementais, os codificadores absolutos também têm um eixo rotativo conectado ao sensor. O eixo é conectado a um disco com um conjunto de ranhuras cuidadosamente colocadas. Essa roda também é conhecida como 'roda-código'.
A roda de código possui um padrão de bits exclusivo. Ao contrário dos codificadores incrementais, onde todos os slots são colocados em um padrão de repetição, os slots da roda de código do codificador absoluto são diferentes uns dos outros.
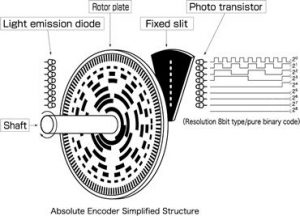
Quando o eixo gira, a roda codificante também gira junto com ele. Há um conjunto de LEDs que emitem feixes de luz na roda de código. Quando os feixes de luz se alinham com as fendas, os feixes passam pela roda de código, a fenda fixa e iluminam os fototransistores.
Existem codificadores absolutos magnéticos que substituem a matriz de LED por uma matriz de detecção magnética e um conjunto de pólos magnéticos substituindo os marcadores ópticos.
Cada fototransistor funciona de forma independente e quando iluminado, eles emitem um sinal lógico ALTO. Quando não há feixe presente em um fototransistor específico, ele produz LOW lógico.
O número de fototransistores e níveis de slots gravados na roda de código determina a precisão e resolução do codificador rotativo absoluto.
Isso geralmente é declarado em pedaços. Por exemplo, um codificador absoluto de resolução de 8 bits pode fornecer informações de 256 posições e pode medir deslocamentos angulares de incrementos de 1.41 graus.
Dependendo do tipo de codificador absoluto e sua construção, existem várias configurações de saída disponíveis:
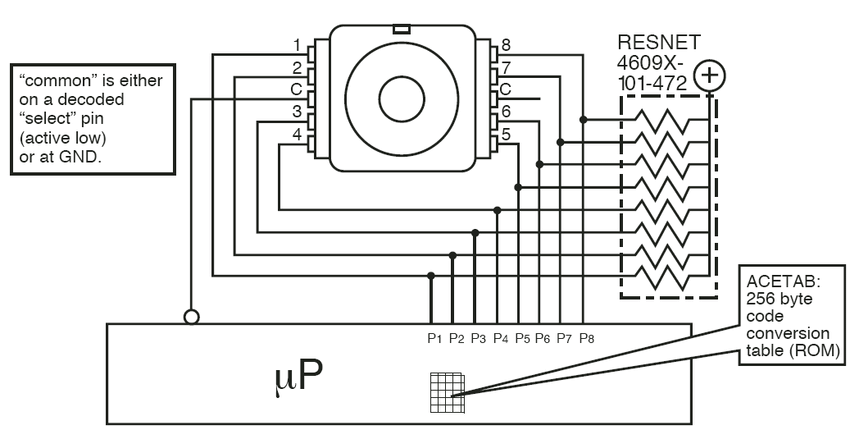
- Saída paralela
- Este tipo de sensor possui várias linhas de saída que fornecem as informações de posição. Por exemplo, um sensor de saída paralela de 8 bits possui 8 linhas de sinal e dois fios de alimentação. A saída pode ser codificada em binário or código cinza formato.
- Os sensores de saída paralela têm uma quantidade mínima de circuitos integrados, pois não envolvem muito processamento.
- Saída serial
- Os codificadores absolutos de saída serial fornecem as informações de posição e velocidade por meio de um protocolo de transmissão de dados síncrona.
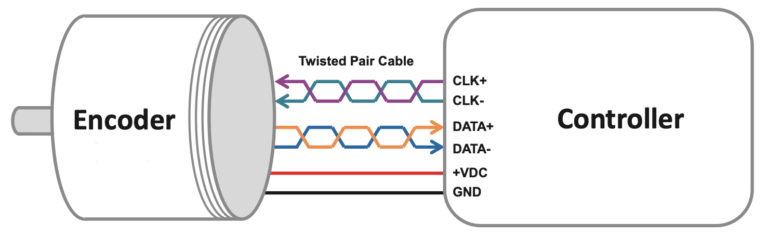
- Os sensores de saída serial têm linhas de dados e clock e geram um bit para cada pulso de clock. Esses sensores também vêm em formatos de saída binários ou codificados em cinza.
- Para maior imunidade a ruído, os sensores de tipo de saída serial usam comunicação de par diferencial de acordo com Padrão RS-422. Um par por relógio e outro para as linhas de dados.
- Os métodos de comunicação síncrona mais populares para codificadores absolutos são SSI: Interface serial síncrona, BiSS: Interface serial síncrona bidirecional e Hiperface DSL. Existem também interfaces proprietárias, como EnDat2.2.
- Saída analógica
- Os sensores de saída analógica emitem um valor de tensão ou corrente dependendo da posição do sensor.
Vantagens dos codificadores absolutos
Codificadores absolutos, embora custem um pouco mais alto, têm várias vantagens em termos de detecção de posição:
- Produz a posição absoluta do eixo
- Quando 'pesquisados', os codificadores absolutos emitem uma informação de posição única relacionada à sua posição atual. Isso significa que nenhuma posição do eixo em uma rotação de 360 graus é idêntica.
- Múltiplas opções de saída
- Os codificadores absolutos têm vários tipos de saída: paralela, serial (protocolos padrão e proprietários)
- Imune a falhas de energia
- Os codificadores absolutos não sofrem com falhas de energia. Eles estão sempre prontos para fornecer informações de posicionamento logo após um ciclo de alimentação.
- Alta resolução
- Simplesmente aumentando o número de trilhas do codificador e unidades de detecção, os codificadores absolutos podem ter uma resolução muito maior do que os codificadores incrementais.
Codificadores incrementais vs. absolutos
A principal diferença entre os codificadores absolutos e incrementais é sua operação. Os codificadores absolutos podem fornecer informações de posição mesmo quando o eixo não está girando.
Os codificadores incrementais só podem fornecer pulsos quando o eixo está girando. Uma contagem separada de pulsos deve ser realizada para determinar a posição e distância relativas.
Os codificadores incrementais devem ter um marcador de 'homing' separado para determinar a posição inicial / de referência do eixo. No entanto, os codificadores absolutos não precisam dessa adição e podem fornecer uma posição imediata para alojar o eixo.
Isso pode ser muito útil em aplicações onde girar o eixo para obter a posição 'inicial' é indesejável.
Os codificadores incrementais requerem módulos decodificadores especiais de alta velocidade para obter as informações de velocidade, posição e distância. Isso limita a integração com dispositivos eletrônicos diferentes de PLCs e microcontroladores. Às vezes, a sobrecarga de processamento também pode afetar negativamente o desempenho do sistema.
Os sensores absolutos têm uma resolução geral mais alta do que as contrapartes incrementais. A resolução dos codificadores incrementais é limitada ao tamanho físico do disco e à resposta de freqüência do sistema.
Os codificadores absolutos estão sempre prontos para fornecer informações de posição sob demanda, enquanto os codificadores incrementais precisam ser constantemente monitorados para obter o trem de pulso e calcular a velocidade, direção e distância atuais. Devido a isso, os codificadores absolutos podem se recuperar facilmente de falhas de energia.
Aplicativos de codificador absoluto
Os codificadores absolutos são usados principalmente em aplicações de posicionamento de alta precisão, como,
- Máquinas CNC multi-eixos (montagem e manufatura)
- Braços robóticos (robôs cirúrgicos, diagnóstico por imagem)
- Sistema de posicionamento de elevadores
- Aplicativos de impressão
- Indústria do automobilismo (sistemas steer-by-wire) e muito mais.
Saída Absoluta do Codificador
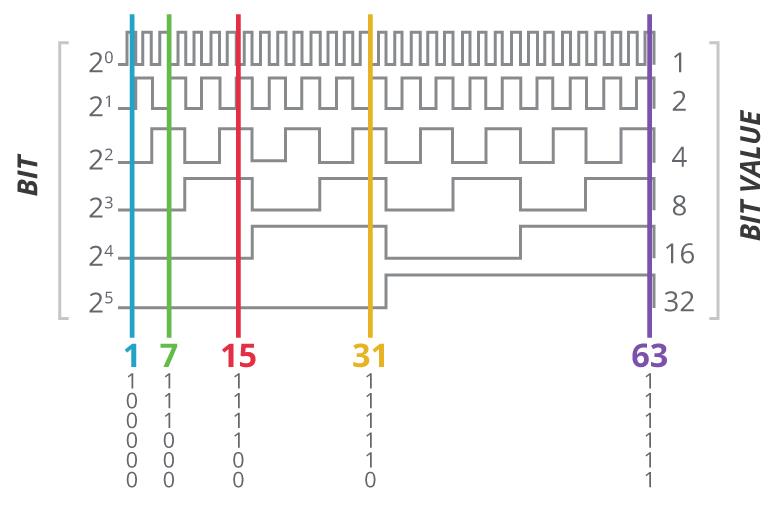
Os codificadores absolutos geram um conjunto de bits chamado 'uma palavra' para cada posição do eixo. Existem três tipos de saídas para codificadores absolutos: paralelo, serial e analógico.
Os codificadores de saída paralela têm n-número de fios (n = número de bits (resolução)) emitindo os bits correspondentes da palavra. A figura mostrada abaixo mostra uma saída de codificador absoluto de palavra de 6 bits. A palavra de saída pode ser de código cinza or binário formato.
Os codificadores de saída serial geram um fluxo de dados quando 'pesquisados'. O sensor possui um circuito integrado de processamento de sinal baseado em microcontrolador. Existem sistemas de barramento serial, como SSI, BiSS, EnDat, Modbus e Profibus, que permitem que um dispositivo compatível se comunique com o sensor.
Os sensores de saída analógica emitem um sinal de tensão ou corrente dependendo da posição do sensor.
Tipos de codificadores absolutos
Os codificadores absolutos podem ser categorizados com base na tecnologia de detecção como ótico e magnético. Uso de codificadores ópticos luz visível (LEDs) e uma roda de código com fenda.
Uso de codificadores magnéticos pólos magnéticos e de um matriz de detecção magnética para obter a posição atual da roda de código.
A outra classificação é baseada no tipo de saída. Existem codificadores absolutos de uma volta e de várias voltas. Os codificadores absolutos de uma volta só podem fornecer informações de posicionamento em uma única volta de 260 graus.
Os codificadores multivoltas fornecem dados adicionais que fornecem o número de voltas de 360 graus que o eixo girou. Isso ajuda a determinar o número de rotações sem ter que contar desde o início.
Codificadores Absolutos de uma volta vs. Multi-voltas
Dependendo da disponibilidade de uma função especial para contar as revoluções, existem dois tipos de codificadores absolutos: Codificadores absolutos de uma e de várias voltas.
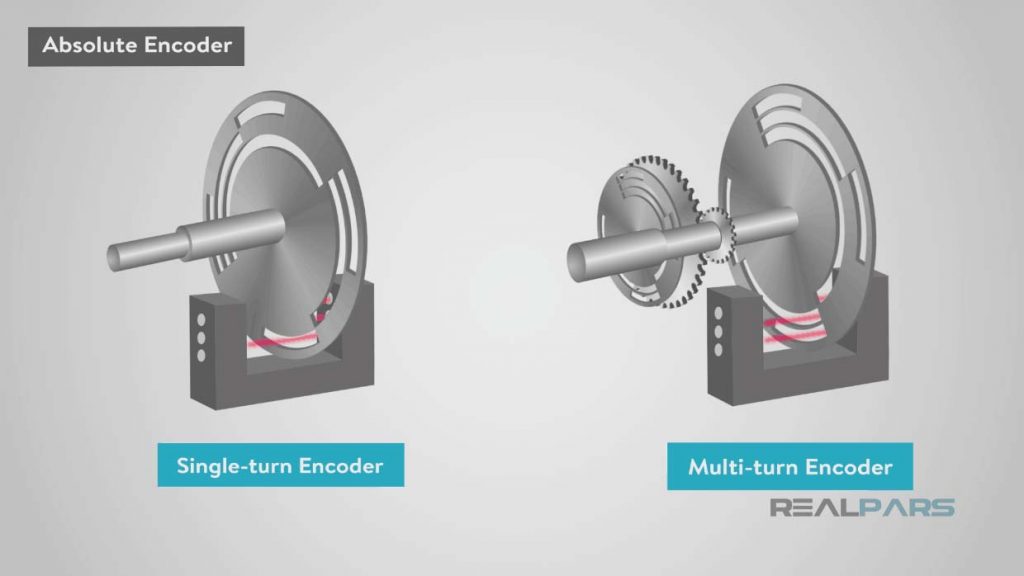
Os codificadores absolutos de uma volta podem medir a posição em uma rotação.
Por exemplo, se um codificador absoluto de uma volta gira 360 graus de sua posição inicial e atinge o 361º grau de rotação, o sensor iniciará a saída desde o início. Ele indicará a posição como 1 grau.
Esses sensores não podem contar ou fornecer um sinal especial quando a rotação excede uma revolução completa. Por exemplo, o Sensores da série 845G por Allen Bradley têm saída de 12 bits, 0 como mínimo e 4095 sendo a posição máxima. Quando atinge 4096, a saída chega a 0.
Codificadores absolutos de uma volta são encontrados em aplicativos como:
- telescópios
- Antenas Rotativas
- Geradores de turbinas eólicas
- Portões / Portas
Os codificadores de uma volta só não têm o recurso de contagem de voltas e podem ser usados para medições de velocidade e posição. Se necessário, a posição inicial pode ser usada como uma referência e o método do software pode ser usado para contar o número aproximado de revoluções.
Os codificadores absolutos multivoltas, por outro lado, também podem contar as revoluções. Por exemplo, um codificador absoluto multivoltas de 12 bits tem 4096 passos por revolução e também pode contar 4096 revoluções. Os codificadores multivoltas usam uma das seguintes tecnologias para reter a contagem de revoluções:
- Tipo de engrenagem
- Os codificadores com engrenagens usam um conjunto de engrenagens planetárias para rastrear o número de revoluções. Esses tipos têm uma desvantagem de desgaste mecânico ao longo do tempo.
- Tipo de bateria reserva
- Este tipo usa um contador eletrônico e uma memória para armazenar as informações do contador. Eles podem contar as revoluções mesmo quando desligados. No entanto, na maioria dos casos, a bateria está embutida no sensor. Pode ser necessário substituí-lo de vez em quando, dependendo da frequência de uso.
- Tipo de sensor Wiegand
- WiegandSensores do tipo com fio usam um fio especial enrolado perto do eixo e usam um pulso magnético para acionar uma mudança na polaridade. Essa mudança ocorre após cada revolução concluída. Essa comutação é usada para contar o número de revoluções.
Codificadores multivoltas são encontrados em aplicativos como,
- Articulações robóticas
- Guindastes
- Servo motores (360 servos)
- Sistemas de controle de antena parabólica e muitos mais onde um ponto de pivô de rotação não está acessível / disponível.
O que é um codificador magnético absoluto?
Os codificadores magnéticos absolutos usam pólos magnéticos e sensores magnéticos em vez de LEDs e fotodiodos encontrados nos codificadores ópticos. A imagem abaixo mostra um exemplo de roda codificadora magnética com codificação absoluta.
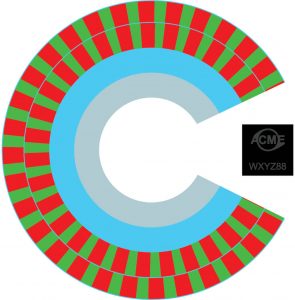
O arranjo de pólo externo tem mais um pólo magnético do que o arranjo interno. Isso faz com que os pares de pólos interno e externo sejam deslocados de maneira exclusiva.
Os sensores captam sinais de um pólo por roda de cada vez e calculam sua diferença de fase (mudança de fase). Essa diferença de fase analógica é então convertida em um valor digital para saída.
Os codificadores magnéticos são muito robustos e resistentes a choques e vibrações.
Eles encontram suas aplicações em ambientes onde há poluentes particulados como poeira, umidade e outras partículas de materiais podem se acumular. No entanto, devido ao seu princípio de operação, os codificadores magnéticos são suscetíveis a interrupções causadas por campos magnéticos fortes.
Interface de um codificador absoluto com Raspberry Pi
Embora conectar um codificador absoluto com um Raspberry Pi possa ser simples, o programa para ler corretamente as entradas pode se tornar um pouco complicado dependendo do tipo de sensor. Vamos dar uma olhada em como fazer a interface de um codificador absoluto do tipo de saída serial (EMS22A) com um Raspberry Pi.
Fiação do sensor
O sensor tem o seguinte formato de fiação:
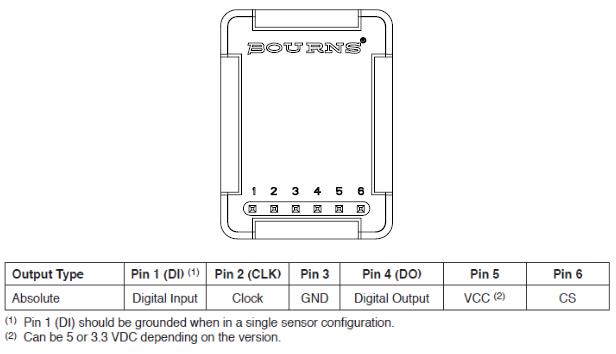
Conecte os fios do sensor da seguinte forma com o Raspberry Pi:
- Pino 2 (CLK) -> RPi pino 2
- Pino 4 (DO) -> RPi pino 3 (se estiver usando mais de um sensor, conecte o pino de dados do segundo sensor ao pino 14)
- Pino 6 (CS) -> RPi pino 4
- VCC -> RPi + pino 5V
- GND -> Pino RPi GND
Código de exemplo
Para pesquisar as informações do sensor, o seguinte código de amostra escrito por Haresh Karnan pode ser usado. Ele imprimirá as leituras do sensor conectado quando executado.
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
PIN_CLK = 2
PIN_DAT = [3,14]
PIN_CS = 4
delay = 0.0000005
ns = 2 # number of sensors attached
# totally 10 bits to be extracted from SSI signal
bitcount = 16
# pin setup done here
try:
GPIO.setup(PIN_CLK,GPIO.OUT)
GPIO.setup(PIN_DAT[:],GPIO.IN)
GPIO.setup(PIN_CS,GPIO.OUT)
GPIO.output(PIN_CS,1)
GPIO.output(PIN_CLK,1)
except:
print "ERROR. Unable to setup the configuration requested"
#wait some time to start
time.sleep(0.5)
print "GPIO configuration enabled"
def clockup():
GPIO.output(PIN_CLK,1)
def clockdown():
GPIO.output(PIN_CLK,0)
def MSB():
# Most Significant Bit
clockdown()
def readpos():
GPIO.output(PIN_CS,0)
time.sleep(delay*2)
MSB()
data = [0]*ns
for i in range(0,bitcount):
if i<10:
#print i
clockup()
for j in range(0,ns):
data[j]<<=1
data[j]|=GPIO.input(PIN_DAT[j])
clockdown()
else:
for k in range(0,6):
clockup()
clockdown()
GPIO.output(PIN_CS,1)
return data
try:
while(1):
print readpos()
time.sleep(0.001)
#break
finally:
print "cleaning up GPIO"
GPIO.cleanup()
Preço absoluto do codificador
Os preços do codificador rotativo absoluto variam de $ 10-15 a mais de $ 1000. Isso se deve principalmente aos recursos disponíveis, à resolução, ao tipo de saída e ao protocolo que está sendo usado. Sensores proprietários de alta resolução tendem a custar mais do que sensores do tipo de saída paralela simples, que podem ser adquiridos a um custo menor.
Conclusão
Codificadores rotativos são usados para rastrear componentes mecânicos rotativos, como eixos e hastes. Os codificadores absolutos e os codificadores incrementais são os dois tipos de codificadores rotativos.
Existem dispositivos de interface de codificador especiais que podem ler a entrada bruta de um codificador rotativo e enviar as informações de velocidade, posição e distância para um computador.
Os codificadores compatíveis também podem ser conectados diretamente a PLCs e outros computadores para obter os valores brutos e realizar cálculos no software.

