Introductie
Industriële automatiseringstoepassingen hebben vaak detectie van objecten nodig. Er zijn veel soorten sensoren die zijn ontworpen om de aanwezigheid van objecten van bijna elk materiaal te detecteren.
Hall-effectsensoren zijn speciaal ontworpen om magnetische objecten te detecteren. Ze worden vaak aangetroffen in toepassingen voor het meten van snelheid/positie.
Wat is een Hall-effect nabijheidssensor?
Hall-effect sensoren behoren tot de familie van nabijheidssensoren. Ze detecteren de aanwezigheid met behulp van de grootte van het magnetische veld dat door een object wordt gecreëerd. Het principe van Hall-effect wordt gebruikt om de aanwezigheid en intensiteit van een magnetisch veld te detecteren.

Hall-effectsensoren kunnen elk magnetisch object detecteren dat de juiste polariteit en voldoende sterkte heeft. Dit omvat elektromagneten en permanente magneten zoals: neodymium magneten.
Hall-sensoren worden gebruikt in toepassingen voor positie-, nabijheids- en snelheidsdetectie. De moderne auto's gebruiken bijvoorbeeld hall-effectsensoren om de voertuigsnelheid, de krukaspositie van de motor en de snelheid te berekenen.
Een van de meest populaire systemen die gebruik maken van hall-effectsensoren is de Antiblokkeerrem (ABS) systemen in voertuigen. In automatiseringstoepassingen vinden hall-sensoren hun gebruik in motorische controle en zelfs DC-stroomdetectie:.
Hoe werkt een naderingssensor met Hall-effect?
Hall-effectsensoren bestaan voornamelijk uit een dun stuk rechthoekige halfgeleider. De halfgeleider is vaak gemaakt van galliumarsenide (GaAs), indiumarsenide (InAs) of indiumantimonide (InSb).
Door deze geleider mag te allen tijde een continue stroom lopen. Wanneer een magneet dicht bij deze dunne halfgeleider wordt geplaatst, verstoort deze de stroom door de ladingsdragers in de halfgeleider af te buigen.
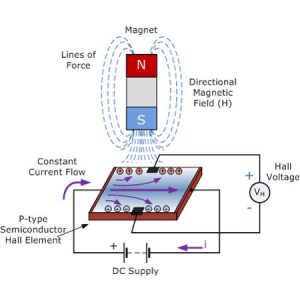
Dit fenomeen zorgt ervoor dat er een spanningsverschil ontstaat, loodrecht op de stroomstroom en over de halfgeleider. Dit wordt in de afbeelding hierboven weergegeven als positieve en negatieve ladingen.
Deze spanning wordt genoemd Zaalspanning, vernoemd naar de natuurkundige Edwin Herbert Hall wie heeft het ontdekt. Om een meetbaar spanningsverschil te genereren, moet de magneet:
- Magnetische fluxlijnen moeten loodrecht staan
- De pool naar de sensor moet de juiste polariteit hebben. Dit is vaak de Zuidpool van de magneet.
Een typische Hall-effectsensor heeft het volgende blokschema dat de functionaliteit van het circuit weergeeft.
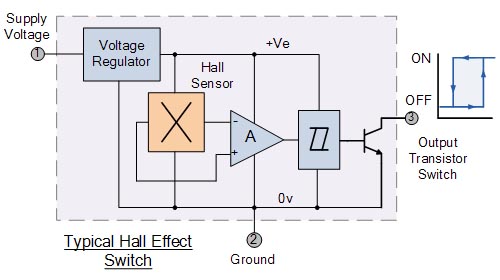
De spanningsregelaar zorgt voor een soepele, stabiele spanning voor de sensor, de versterker en andere componenten.
Wanneer een magnetisch object in de buurt van de sensor wordt geplaatst, neemt de Hall-spanning toe. De versterker versterkt dit verschil om de schmitt-trigger te voeden voor een zuivere, jittervrije output.
Wanneer het versterkte signaal een bepaalde drempel overschrijdt, wordt de schmitt-trigger geactiveerd. Het signaal van de schmitt-trigger activeert de transistor.
De transistor werkt als het uitgangsschakelapparaat, dat de uitgang in- of uitschakelt. De component van de eindtrap is afhankelijk van het uitgangstype van de sensor.
Het kan een transistor (NPN/PNP), een relais of zelfs het ruwe, analoge signaal zijn dat de sterkte van het magnetische veld vertegenwoordigt.
Wat zijn de soorten Hall-effectsensoren?
Hall-effectsensoren kunnen op meerdere manieren worden ingedeeld.
- Bipolaire en Unipolaire Hall-effectsensoren
- Bipolaire sensoren worden ook wel 'latching'-types genoemd. Hun uitgangen worden geactiveerd wanneer een positief magnetisch veld (zuidpool) aanwezig is. Voor het uitschakelen/vrijgeven van de uitgang moet een negatief veld (noordpool) worden aangelegd.
- Unipolaire sensoren schakelen de uitgang in als er een magnetische zuidpool aanwezig is en schakelen de uitgang uit als de magneet wordt verwijderd.
- Digitale en analoge uitgangen
- Sensoren van het digitale uitgangstype geven een duidelijke logische HIGH of LOW-uitgang af, terwijl analoge sensoren een reeks waarden uitvoeren, zoals 0-5V of 4-20mA.
Wat is het bereik van een Hall-effectsensor?
Hall-sensoren hebben een typisch werkbereik van ongeveer 0-40mm. Dit is echter ook direct afhankelijk van de magnetische fluxdichtheid van het object.
Sterkere magneten hebben meer invloed en kunnen de sensor op relatief grotere afstand triggeren. Zwakkere magneten moeten heel dicht bij de sensor worden geplaatst om deze te activeren.
Wat is het verschil tussen een Hall-sensor en een inductieve sensor?
Het belangrijkste verschil tussen deze twee sensoren is de manier waarop ze objecten detecteren. Inductieve naderingssensoren genereren hun eigen magnetische veld en bewaken de veldverandering om objecten te detecteren.
Dit betekent dat de sensor de verandering in zijn eigen magnetische veld door externe objecten.
Hall-effectsensoren bewaken externe magnetische velden. Ze vereisen dat het gedetecteerde object zijn eigen magnetisch veld creëert. Hall-effectsensoren kunnen daarom alleen permanente magneten en elektromagneten detecteren.
Inductieve naderingssensoren kunnen vele soorten metalen detecteren, zoals ijzer, koper en aluminium.
Nabijheidssensoren met Hall-effect zijn gevoelig voor magnetische interferentie. Inductieve naderingssensoren zijn relatief tolerant voor deze interferenties. De prestaties van beide sensoren kunnen echter worden beïnvloed door extreme temperaturen en chipopbouw.
Gezien de complexiteit van de installatie, zijn inductieve sensoren relatief eenvoudiger te installeren, omdat ze een deel van de machine als detectieobject kunnen gebruiken (dwz limietdetectie).
Hall-sensoren vereisen een speciale magnetische bevestiging die aan de machine wordt bevestigd, behalve de sensor zelf (dwz wielsnelheidsdetectie).
Een Hall-effectsensor gebruiken met Arduino
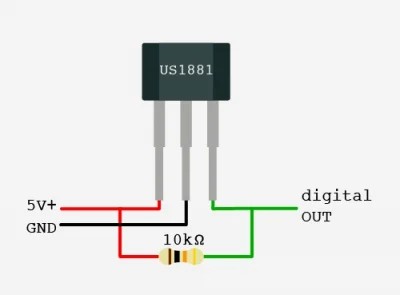
Net als bij industriële naderingssensoren zijn er miniatuurversies van op de markt verkrijgbaar. De US5881/US1881 zijn enkele van de populaire hall-effectsensoren die 5V-compatibel zijn.
Dit betekent dat we ze gemakkelijk kunnen integreren met een Arduino om magnetische objecten te detecteren.
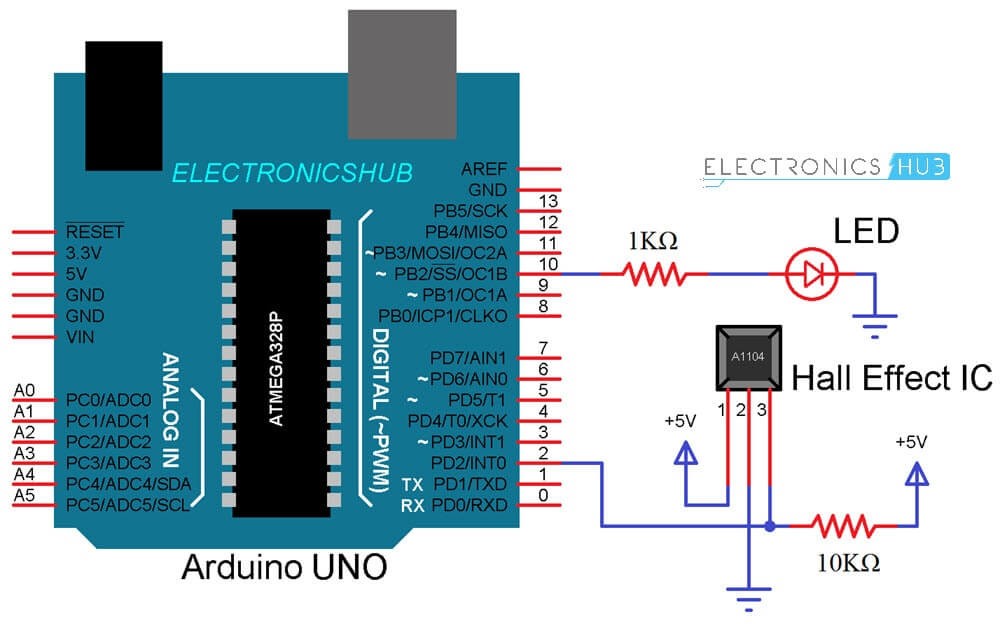
De onderstaande afbeelding toont de typische bedrading van een US1881 naar een Arduino. De weerstand van 10k werkt als een pull-up weerstand om een stabiele invoer naar de Arduino te bieden wanneer er geen object wordt gedetecteerd.
De uitgangspin van de US1881 kan worden aangesloten op elke digitale pin van de Arduino. Als de sensor wordt gebruikt om de snelheid van een wiel te meten, kan het nuttig zijn om een pin te gebruiken die externe onderbrekingen ondersteunt.
In dit voorbeeld is de hall-sensoruitgang aangesloten op pin 2 van de Arduino Uno.
| const int ledPin = 10; const int hallPin = 2; komen te vervallen setup() { pinMode (ledPin, UITGANG); pinMode(hallPin,INVOER); } komen te vervallen lus() { if(digitalRead(hallPin) == LAAG){ digitalWrite (ledPin, HOOG); } anders { digitalWrite (ledPin, LAAG); } } |
Deze Arduino bewaakt constant de status van de uitgang van de Hall-sensor. Wanneer een magneet in de buurt van de sensor wordt geplaatst, geeft deze een logisch LAAG-signaal af.
De Arduino houdt dit in de gaten en als het signaal LAAG is, gaat de LED aan. Als er geen magneet aanwezig is, is de uitgang van de hall-sensor logisch HOOG. Als de Arduino dit observeert, schakelt de LED uit.
Conclusie
In dit artikel hebben we besproken wat naderingssensoren met Hall-effect zijn, hoe ze werken en wat hun toepassingen zijn. Hall-effectsensoren zijn uiterst nuttig in toepassingen met hoge snelheid, zoals snelheidsdetectie.
Afhankelijk van de toepassing kunnen er ook betere alternatieven zijn zoals inductieve, optische of capacitieve naderingssensoren.

