Introductie
Sensoren zijn een integraal onderdeel van elk automatiseringssysteem om de aanwezigheid van objecten te detecteren. Bij het overwegen van foto-elektrische sensoren zijn er drie soorten sensoren: thru-beam, reflecterend en diffuus. Er is een verbeterde versie van diffuse modussensoren die 'achtergrondonderdrukkingssensoren' worden genoemd. In dit artikel zullen we het hebben over achtergrondonderdrukkingssensoren en hoe ze werken.
Wat is een achtergrondonderdrukkingssensor?
Laten we, voordat we het hebben over achtergrondonderdrukking, onze kennis over foto-elektrische sensoren in het algemeen opfrissen. Foto-elektrische sensoren gebruiken optische signalen om de aanwezigheid van een object te detecteren. Er zijn drie hoofdtypen foto-elektrische sensoren: zender-ontvanger (thru-beam), retroreflectief en diffuse modus.
Soorten foto-elektrische sensoren
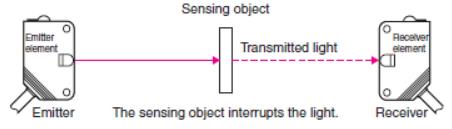
Zender-ontvanger zijn de eenvoudigste vorm van foto-elektrische sensoren. Ze hebben een aparte zender en ontvanger die tegenover elkaar zijn geplaatst. Wanneer een object de laser-/lichtstraal blokkeert, activeert de afwezigheid van de lichtstraal de ontvanger. Dit signaal kan worden gebruikt om te detecteren of het object aanwezig is of niet.
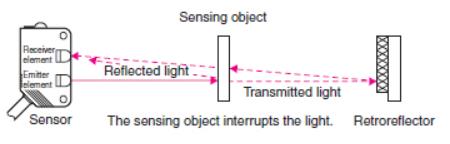
Bij retroreflecterende sensoren zijn zowel de zender als de ontvanger in dezelfde eenheid ingebouwd. Over de bundel wordt een speciaal type reflector geplaatst die de uitgezonden bundel op een specifieke manier terugkaatst naar de zender. Wanneer een object over de straal wordt geplaatst, wordt de gereflecteerde straal verstrooid en verandert de hoeveelheid gereflecteerd licht. Hierdoor kan de sensor zelfs transparante objecten detecteren vanwege de breking die in het object zelf aanwezig is. Retroreflectieve sensoren vertrouwen op de onderbreking van de straal om het object te detecteren.
Diffuus reflecterende sensoren zijn het derde type foto-elektrische sensoren. Ze vertrouwen op het object zelf om de lichtstraal terug naar de sensor te reflecteren. Om deze reden hebben diffuus reflecterende sensoren geen reflector nodig.
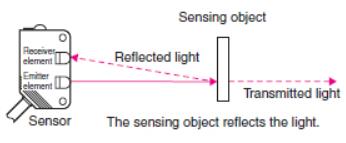
Standaard sensoren in diffuse modus gebruiken de hoeveelheid gereflecteerd licht om een object te detecteren.
Probleem met reflectie in diffuse modus
In veel gevallen bieden reflecterende sensoren met diffuse modus een kalibratieoptie waarbij de detectieafstand/-bereik kan worden aangepast. Omdat de sensor echter afhankelijk is van het object om de straal te weerkaatsen, kan elk ander glanzend object over de straal dan het object de straal ook weerkaatsen. Dit veroorzaakt valse triggers en kan aanzienlijke problemen veroorzaken.
Een standaard diffuse-modussensor die is ingesteld om een reflecterend object binnen 15 inch te detecteren, kan bijvoorbeeld ten onrechte een ander object detecteren dat ook sterk reflecterend is en dat zich op een afstand van wel 6 meter kan bevinden.
Achtergrondonderdrukkingssensor
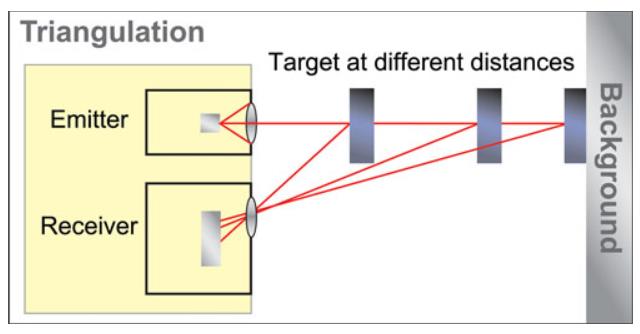
Sensoren voor achtergrondonderdrukking helpen het hierboven besproken probleem te verminderen. Het is een variatie op een reflecterende sensor met diffuse modus die gebruikmaakt van het 'triangulatieprincipe'. In tegenstelling tot een reguliere diffuse mode sensor die de hoeveelheid gereflecteerd licht meet, meten achtergrondonderdrukkingssensoren onder welke hoek het gereflecteerde licht op de sensor valt.
Werkingsprincipe van de achtergrondonderdrukkingssensor
Sensoren voor achtergrondonderdrukking zijn vergelijkbaar met sensoren in diffuse modus. Ze hebben zowel de zender als de ontvanger ingebed in dezelfde behuizing en vertrouwen erop dat het gedetecteerde object de straal terugkaatst.

Wanneer een object voor een achtergrondonderdrukkingssensor wordt geplaatst, wordt de straal onder een hoek teruggekaatst. Deze hoek verandert afhankelijk van de afstand van de sensor tot het object. Wanneer het object dichterbij is, is de hoek groter dan wanneer het ver weg is.
Instelbare sensortypen zijn verkrijgbaar in twee typen: mechanisch of elektrisch. Bij het mechanische type kan de sensor worden gekalibreerd met behulp van een schroef om het interessante punt aan te passen om het object te detecteren. Bij elektronisch gekalibreerde modellen heeft de sensor een knop om het type object en de achtergrond te 'leren'.
Hoe onderdrukken de achtergrondonderdrukkingssensoren de achtergrond?
Achtergrondonderdrukkingssensoren hebben een slim mechanisme om de relatieve positie van het object ten opzichte van de achtergrond te meten. Dit maakt dit type sensor zeer immuun voor achtergronden die vergelijkbare reflecterende eigenschappen hebben als het object dat wordt gedetecteerd.
In tegenstelling tot sensoren met vaste focus of scherp afgesneden type, die helemaal geen rekening houden met de achtergrond, kunnen achtergrondonderdrukkingssensoren het object daadwerkelijk onderscheiden van een gelijkaardige gestructureerde, gekleurde achtergrond.
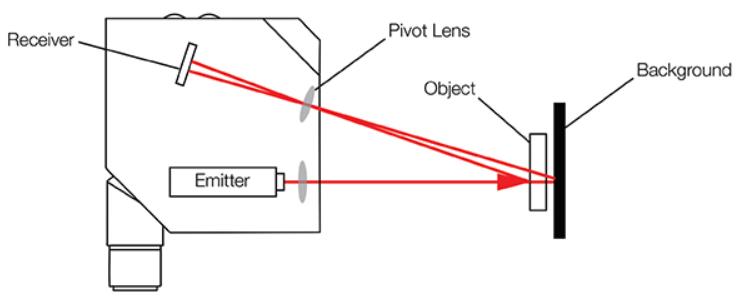
In een achtergrondonderdrukkingssensor is er een enkele zender en meerdere ontvangers die gevoelig zijn voor het uitgezonden licht. Dit kunnen ook meerdere regio's zijn van dezelfde sensor in het type elektronische achtergrondonderdrukking.
Als er zich geen object voor de sensor bevindt, kunnen er twee scenario's zijn.
- De uitgezonden straal wordt gereflecteerd door de achtergrond
- De uitgezonden straal wordt niet gereflecteerd door de achtergrond
Als de straal niet wordt gereflecteerd door de achtergrond, concludeert de sensor dat de afstand tot het object oneindig is en activeert de sensor zijn output niet. Als de achtergrond reflecterend is, valt de gereflecteerde straal op een bepaald gebied van de ontvanger (op het bovenste gebied van de sensor in de bovenstaande afbeelding).
De sensor is gekalibreerd/afgesteld om dit gebied van het sensorelement te negeren. Wanneer een object voor de sensor wordt geplaatst, verandert de hoek van de gereflecteerde bundel. Hierdoor schijnt de straal op een ander deel van de sensor (of een ander sensorelement in sommige modellen) dat de sensor als detectie kan onderscheiden.
Merk in de bovenstaande afbeelding op hoe de dichtstbijzijnde positie bij de sensor de grootste hoek in de gereflecteerde straal veroorzaakt. De hoek neemt af naarmate het object van de sensor weg beweegt.
Mechanische achtergrondonderdrukking versus elektronische achtergrondonderdrukking
Om kosten en prestaties te optimaliseren, zijn er twee typen achtergrondonderdrukkingssensoren: mechanische en elektronische typen. Het elektronische type heeft een enkele, grote sensor waar softwareverwerking wordt gedaan om het objectdetectiegebied in te stellen en te bepalen. Dit wordt bereikt door een speciale sensor genaamd Position Sensitive Device (PSD). Door softwareverwerking van het signaal kan extra filtering op het signaal worden uitgevoerd om artefacten door zware trillingen te verminderen. Dit is een van de voordelen van elektronische BGS-sensoren.
Op mechanische typen zijn er twee of meer sensorelementen voor een hogere nauwkeurigheid, betere optische prestaties en een scherper afsnijbereik met temperatuurstabiliteit. Er is ook een optisch systeem om fijnafstemming mogelijk te maken, wat bijdraagt aan de grootte van de sensoreenheid.
Conclusie
In dit artikel hebben we achtergrondonderdrukkingssensoren besproken. Deze sensoren zijn erg handig bij het detecteren van reflecterend materiaal op achtergronden met een vergelijkbare kleur/textuur. Pepperl + Fuchs is een van de toonaangevende fabrikanten in de branche die foto-elektrische sensoren met diffuse modus produceert die achtergrondonderdrukking hebben.

