Een roterende encoder is een elektromechanisch apparaat dat wordt gebruikt om roterende objecten zoals assen en assen te bewaken. Met roterende encoders kunnen de positie, afstand en hoeksnelheid van de roterende as worden gemeten.
Er zijn twee soorten roterende encoders: incrementele roterende encoders en absolute roterende encoders. In dit artikel zullen we kijken naar absolute roterende encoders, hun werkingsprincipe en toepassingen.
Wat is een absolute roterende encoder?
Absolute roterende encoders behoren tot de familie van roterende encoders. Ze worden gebruikt om de volgende parameters van roterende objecten zoals assen of assen te meten:
- hoeksnelheid
- Positie-informatie
- Afstand

Absolute roterende encoders worden gebruikt in toepassingen waar nauwkeurige meting van positie en hoekverplaatsing vereist is. Deze sensoren vinden ook hun toepassing in systemen waar het toerental gemeten moet worden.
Deze sensoren geven een uniek woord (een woord is een) set bits) volgens de huidige positie van de sensor.
Dit verschilt van incrementele roterende encoders, aangezien incrementele encoders zijn ontworpen om een continue stroom van alomtegenwoordige pulsen terwijl absolute encoders a . uitvoeren unieke set bits per elke positie van de sensor.
Dit stelt ons in staat om de exacte (absolute) positie van de as in plaats van de te berekenen verandering van positie.
Laten we eens dieper ingaan op hoe absolute roterende encoders werken.
Werkingsprincipe van absolute roterende encoder:
Absolute roterende encoders zijn, in vergelijking met incrementele roterende encoders, enigszins complex in gebruik, maar eenvoudig te gebruiken in een toepassing.
Net als de incrementele roterende encoders, hebben absolute encoders ook een roterende as die aan de sensor is bevestigd. De as is verbonden met een schijf met een zorgvuldig geplaatste set sleuven. Dit wiel wordt ook wel het 'codewiel' genoemd.
Het codewiel heeft een uniek bitpatroon. In tegenstelling tot incrementele encoders waarbij alle slots in een herhalend patroon zijn geplaatst, verschillen de slots van het absolute encoder-codewiel van elkaar.
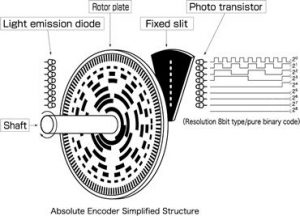
Als de as draait, draait ook het codewiel mee. Er is een set LED's die lichtstralen op het codewiel uitstralen. Wanneer de lichtbundels uitgelijnd zijn met de sleuven, gaan de bundels door het codewiel, de vaste spleet en verlichten de fototransistoren.
Er zijn magnetische absolute encoders die de LED-array vervangen door een magnetische sensorarray en een set magnetische polen die de optische markeringen vervangen.
Elke fototransistor werkt onafhankelijk en wanneer verlicht, geven ze een logisch HOOG-signaal af. Wanneer er geen straal aanwezig is bij een bepaalde fototransistor, geeft deze logisch LAAG af.
Het aantal fototransistoren en de niveaus van slots die in het codewiel zijn gegraveerd, bepalen de nauwkeurigheid en resolutie van de absolute roterende encoder.
Dit wordt meestal vermeld in stukjes. Een absolute encoder met 8-bits resolutie kan bijvoorbeeld 256 positie-informatie leveren en kan hoekverplaatsingen meten in stappen van 1.41 graden.
Afhankelijk van het type absolute encoder en zijn constructie zijn er meerdere uitgangsconfiguraties beschikbaar:
- Parallelle uitvoer
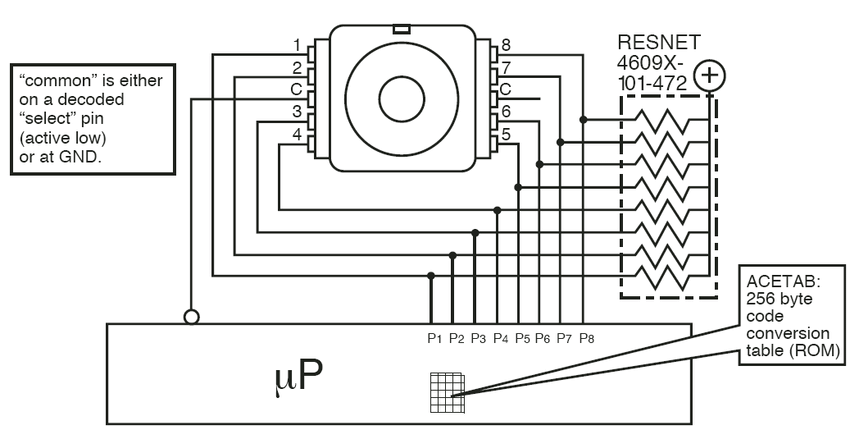
- Dit type sensor heeft meerdere uitgangslijnen die de positie-informatie leveren. Een 8-bits parallelle uitgangssensor heeft bijvoorbeeld 8 signaallijnen en twee voedingsdraden. De uitvoer kan worden gecodeerd in binair or grijze code formaat.
- Parallelle uitgangssensoren hebben een zeer minimale hoeveelheid ingebouwde schakelingen omdat er niet veel verwerking nodig is.
- Seriële uitgang
- Seriële output absolute encoders voeren de positie- en snelheidsinformatie uit via een synchroon datatransmissieprotocol.
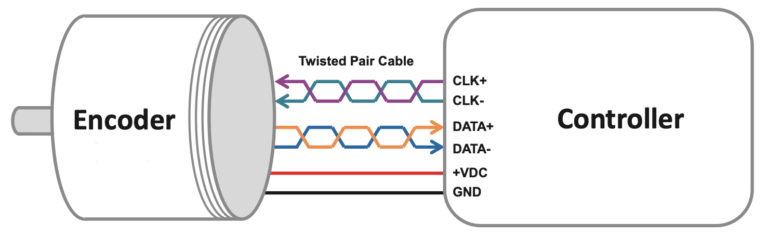
- Seriële uitgangssensoren hebben data- en kloklijnen en geven één bit per klokpuls af. Deze sensoren zijn ook verkrijgbaar in binaire of grijs gecodeerde uitvoerformaten.
- Voor extra ruisimmuniteit gebruiken sensoren van het seriële uitgangstype differentiële paarcommunicatie volgens RS-422 standaard. Een paar per klok en een andere voor de datalijnen.
- De meest populaire synchrone communicatiemethoden voor absolute encoders zijn: SSI: synchrone seriële interface, BiSS: bidirectionele synchrone seriële interface en Hiperface DSL. Er zijn ook eigen interfaces zoals: EnDat2.2.
- Analoge uitgang
- Analoge uitgangssensoren geven een spannings- of stroomwaarde af, afhankelijk van de positie van de sensor.
Voordelen van absolute encoders
Absolute encoders, hoewel de kosten iets hoger zijn, hebben meerdere voordelen op het gebied van positiedetectie:
- Geeft de absolute positie van de as weer:
- Wanneer 'polled', geven absolute encoders unieke positie-informatie uit met betrekking tot de huidige positie. Dit betekent dat geen twee posities van de as in een 360 graden rotatie identiek zijn.
- Meerdere uitvoeropties
- Absolute encoders hebben meerdere outputtypes: parallel, serieel (standaard en eigen protocollen)
- Immuun voor stroomstoringen
- Absolute encoders hebben geen last van stroomstoringen. Ze staan altijd klaar om positie-informatie te geven direct na een power cycle.
- Hoge resolutie
- Door simpelweg het aantal encodersporen en detectie-eenheden te vergroten, kunnen absolute encoders een veel hogere resolutie hebben dan incrementele encoders.
Incrementele versus absolute encoders
Het belangrijkste verschil tussen de absolute en incrementele encoders is hun werking. Absolute encoders kunnen positie-informatie geven, zelfs als de as niet draait.
Incrementele encoders kunnen alleen pulsen geven als de as draait. Om de relatieve positie en afstand te bepalen, moet een afzonderlijke pulstelling worden uitgevoerd.
Incrementele encoders moeten een aparte 'homing'-markering hebben om de begin-/referentiepositie van de as te bepalen. Absolute encoders hebben een dergelijke toevoeging echter niet nodig en kunnen een onmiddellijke positie bieden om de as naar huis te sturen.
Dit kan erg handig zijn in toepassingen waar het roteren van de as om de 'thuis'-positie te verkrijgen ongewenst is.
Incrementele encoders hebben speciale high-speed decodermodules nodig om informatie over snelheid, positie en afstand te verkrijgen. Dit beperkt de integratie met andere elektronische apparaten dan PLC's en microcontrollers. Soms kan de verwerkingsoverhead ook de prestaties van het systeem negatief beïnvloeden.
Absolute sensoren hebben een hogere algehele resolutie dan incrementele tegenhangers. De resolutie van incrementele encoders is beperkt tot de fysieke grootte van de schijf en de frequentierespons van het systeem.
Absolute encoders staan altijd klaar om on-demand positie-informatie te verstrekken, terwijl incrementele encoders constant moeten worden gecontroleerd om de pulsreeks te verkrijgen en de huidige snelheid, richting en afstand te berekenen. Hierdoor kunnen absolute encoders gemakkelijk herstellen van stroomstoringen.
Absolute Encoder-toepassingen
Absolute encoders worden voornamelijk gebruikt in zeer nauwkeurige positioneringstoepassingen zoals
- Meerassige CNC-machines (montage en fabricage)
- Robotarmen (chirurgische robots, diagnostische beeldvorming)
- Positioneringssysteem van liften
- Afdruktoepassingen
- Motorsportindustrie (steer-by-wire-systemen) en nog veel meer.
Absolute encoderuitgang
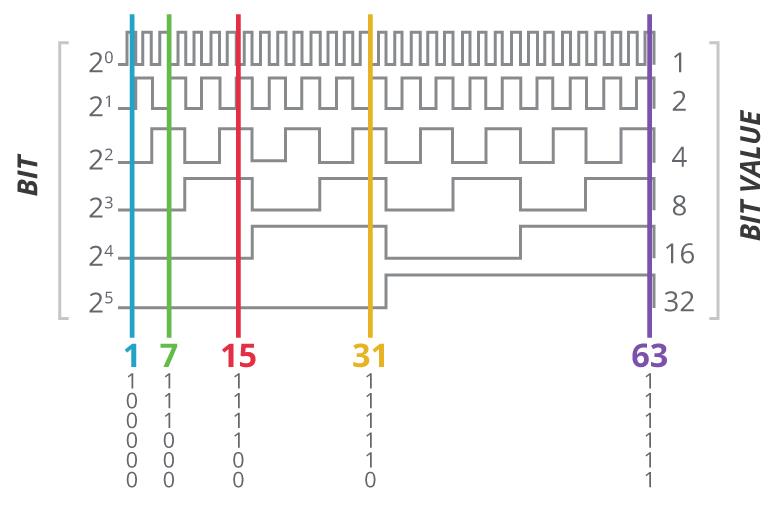
Absolute encoders voeren voor elke positie van de as een reeks bits uit die 'een woord' worden genoemd. Er zijn drie soorten uitgangen voor absolute encoders: parallel, serieel en analoog.
Parallelle output-encoders hebben n-aantal draden (n=aantal bits (resolutie)) die de corresponderende bits van het woord uitvoeren. De onderstaande afbeelding toont een 6-bits woord absolute encoderuitgang. Het uitvoerwoord kan van . zijn grijs-code or binair formaat.
Seriële output-encoders voeren een gegevensstroom uit wanneer ze worden 'opgevraagd'. De sensor heeft een op een microcontroller gebaseerd signaalverwerkingscircuit ingebouwd. Er zijn seriële bussystemen zoals SSI, BiSS, EnDat, Modbus en Profibus waarmee een ondersteund apparaat met de sensor kan communiceren.
Analoge uitgangssensoren geven een spannings- of een stroomsignaal af, afhankelijk van de positie van de sensor.
Soorten absolute encoders
Absolute encoders kunnen worden gecategoriseerd op basis van de detectietechnologie als: systemen voor optische tekenherkenning in combinatie met spraaksynthese en magnetisch. Optische encoders gebruiken zichtbaar licht (LED's) en een codewiel met sleuven.
Magnetische encoders gebruiken magnetische polen en magnetische sensorarray om de huidige positie van het codewiel te verkrijgen.
De andere classificatie is gebaseerd op het uitvoertype. Er zijn single-turn en multi-turn absolute encoders. Single-turn absolute encoders kunnen alleen positioneringsinformatie leveren in een enkele draai van 260 graden.
Multi-turn-encoders leveren aanvullende gegevens die het aantal omwentelingen van 360 graden opleveren dat de as heeft gedraaid. Dit helpt om het aantal omwentelingen te bepalen zonder vanaf het begin te hoeven tellen.
Single-turn vs. Multi-turn absolute encoders
Afhankelijk van de beschikbaarheid van een speciale functie om de omwentelingen te tellen, zijn er twee soorten absolute encoders: Single-turn en Multi-turn absolute encoders.
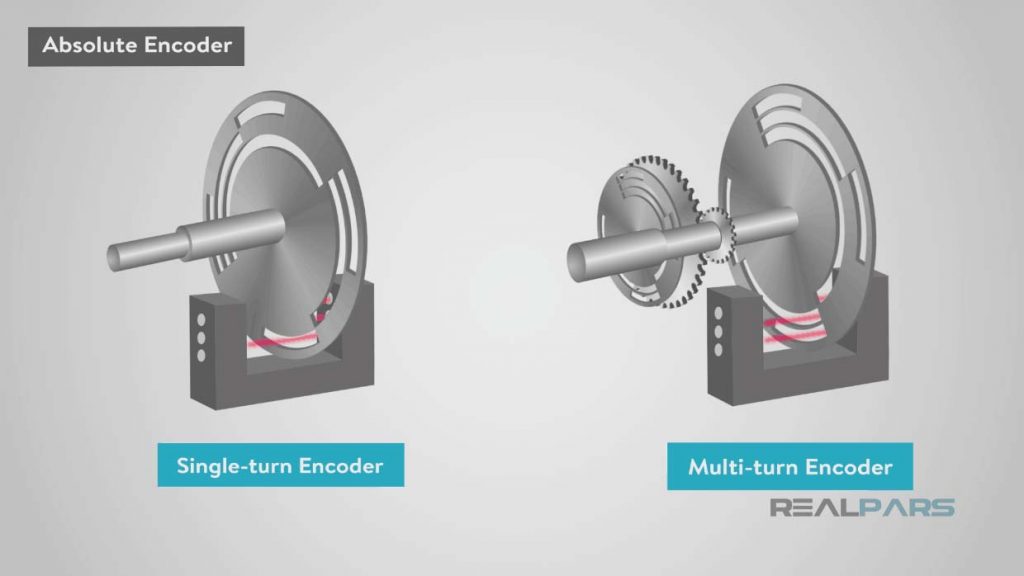
Single-turn absolute encoders kunnen de positie binnen één omwenteling meten.
Als een absolute encoder met één slag bijvoorbeeld 360 graden draait vanaf zijn oorspronkelijke positie en de 361ste graad van rotatie bereikt, start de sensor de uitvoer vanaf het begin. Het geeft de positie aan als 1 graad.
Deze sensoren kunnen niet tellen of een speciaal signaal geven wanneer de rotatie een volledige omwenteling overschrijdt. Bijvoorbeeld de 845G-serie sensoren van Allen Bradley hebben een uitvoer van 12 bits, waarbij 0 als minimum en 4095 de maximumpositie is. Zodra het 4096 bereikt, bereikt de uitvoer 0.
Single turn absolute encoders zijn te vinden in toepassingen zoals:
- telescopen
- Roterende antennes
- Windturbinegeneratoren
- Poorten/Deuren
Single-turn encoders missen alleen de functie voor het tellen van omwentelingen en kunnen worden gebruikt voor snelheids- en positiemetingen. Indien nodig kan de beginpositie als referentie worden gebruikt en kan de softwaremethode worden gebruikt om het geschatte aantal omwentelingen te tellen.
Multi-turn absolute encoders daarentegen kunnen ook de omwentelingen tellen. Een 12-bits multi-turn absolute encoder heeft bijvoorbeeld 4096 stappen per omwenteling en kan ook 4096 omwentelingen tellen. Multi-turn encoders gebruiken een van de volgende technologieën om het aantal omwentelingen vast te houden:
- Geared type:
- Geared encoders gebruiken een set planetaire tandwielen om het aantal omwentelingen te volgen. Deze typen hebben het nadeel van mechanische slijtage in de tijd.
- Type batterij back-up
- Dit type gebruikt een elektronische teller en een geheugen om de tellerinformatie op te slaan. Ze kunnen omwentelingen tellen, zelfs als ze zijn uitgeschakeld. In de meeste gevallen is de batterij echter in de sensor ingebouwd. Afhankelijk van de gebruiksfrequentie kan het nodig zijn deze van tijd tot tijd te vervangen.
- Type Wiegand-sensor
- Wiegand-draadtype sensoren gebruiken een speciale draad die in de buurt van de as is gewonden en gebruiken een magnetische puls om een verandering in polariteit teweeg te brengen. Deze verandering vindt plaats na elke voltooide omwenteling. Deze omschakeling wordt gebruikt om het aantal omwentelingen te tellen.
Multi-turn encoders zijn te vinden in toepassingen zoals,
- robot gewrichten
- Kranen
- Servomotoren (360 servo's)
- Satellietschotelbedieningssystemen en nog veel meer waar een draaipunt niet toegankelijk/beschikbaar is.
Wat is een magnetische absolute encoder?
Magnetische absolute encoders gebruiken magnetische polen en magnetische sensoren in plaats van LED's en fotodiodes in optische encoders. De afbeelding hieronder toont een voorbeeld van een absoluut gecodeerd magnetisch encoderwiel.
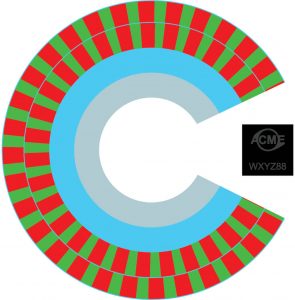
De buitenste poolopstelling heeft één magnetische pool meer dan de binnenste opstelling. Dit zorgt ervoor dat de binnenste en buitenste poolparen uniek zijn verschoven.
De sensoren pikken signalen van één pool per wiel tegelijk op en berekenen hun faseverschil (faseverschuiving). Dit analoge faseverschil wordt vervolgens omgezet in een digitale waarde die moet worden uitgevoerd.
Magnetische encoders zijn zeer robuust en bestand tegen schokken en trillingen.
Ze vinden hun toepassingen in omgevingen waar verontreinigende deeltjes zoals stof, vocht en andere materiële deeltjes zich kunnen ophopen. Door hun werkingsprincipe zijn magnetische encoders echter gevoelig voor storingen veroorzaakt door sterke magnetische velden.
Een Absolute Encoder koppelen met Raspberry Pi
Hoewel het aansluiten van een absolute encoder op een Raspberry Pi eenvoudig kan zijn, kan het programma om de ingangen goed te lezen een beetje ingewikkeld worden, afhankelijk van het sensortype. Laten we eens kijken hoe we een seriële output type absolute encoder kunnen aansluiten (EMS22A) met een Raspberry Pi.
Bedrading van de sensor
De sensor heeft het volgende bedradingsformaat:
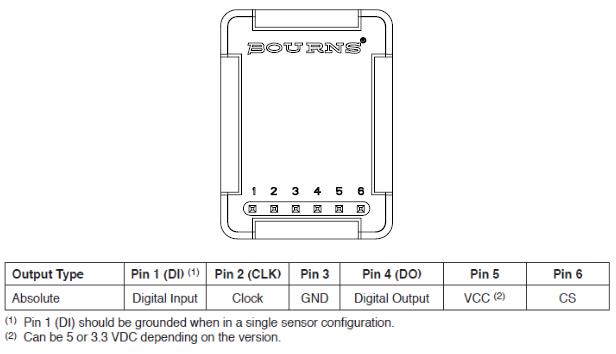
Verbind de draden van de sensor als volgt met de Raspberry Pi:
- Pin 2 (CLK) -> RPi pin 2
- Pin 4 (DO) -> RPi pin 3 (als je meer dan één sensor gebruikt, sluit dan de datapin van de tweede sensor aan op pin 14)
- Pin 6 (CS) -> RPi-pin 4
- VCC -> RPi +5V-pin
- GND -> RPi GND-pin
Voorbeeldcode
Om de informatie van de sensor te pollen, is de volgende voorbeeldcode geschreven door: Haresh Karnan kan worden gebruikt. Het zal de meting(en) van de aangesloten sensor afdrukken wanneer het wordt uitgevoerd.
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
PIN_CLK = 2
PIN_DAT = [3,14]
PIN_CS = 4
delay = 0.0000005
ns = 2 # number of sensors attached
# totally 10 bits to be extracted from SSI signal
bitcount = 16
# pin setup done here
try:
GPIO.setup(PIN_CLK,GPIO.OUT)
GPIO.setup(PIN_DAT[:],GPIO.IN)
GPIO.setup(PIN_CS,GPIO.OUT)
GPIO.output(PIN_CS,1)
GPIO.output(PIN_CLK,1)
except:
print "ERROR. Unable to setup the configuration requested"
#wait some time to start
time.sleep(0.5)
print "GPIO configuration enabled"
def clockup():
GPIO.output(PIN_CLK,1)
def clockdown():
GPIO.output(PIN_CLK,0)
def MSB():
# Most Significant Bit
clockdown()
def readpos():
GPIO.output(PIN_CS,0)
time.sleep(delay*2)
MSB()
data = [0]*ns
for i in range(0,bitcount):
if i<10:
#print i
clockup()
for j in range(0,ns):
data[j]<<=1
data[j]|=GPIO.input(PIN_DAT[j])
clockdown()
else:
for k in range(0,6):
clockup()
clockdown()
GPIO.output(PIN_CS,1)
return data
try:
while(1):
print readpos()
time.sleep(0.001)
#break
finally:
print "cleaning up GPIO"
GPIO.cleanup()
Absolute encoderprijs
De prijzen van absolute roterende encoders variëren van $10-15 tot meer dan $1000. Dit komt voornamelijk door de beschikbare functies, resolutie, uitvoertype en het gebruikte protocol. Gepatenteerde sensoren met een hoge resolutie hebben de neiging meer te kosten dan eenvoudige sensoren van het parallelle uitgangstype die tegen lagere kosten kunnen worden gekocht.
Conclusie
Roterende encoders worden gebruikt om roterende mechanische componenten zoals assen en staven bij te houden. Absolute encoders en incrementele encoders zijn de twee soorten roterende encoders.
Er zijn speciale encoderinterface-apparaten die de onbewerkte invoer van een roterende encoder kunnen lezen en de snelheid, positie en afstandsinformatie naar een computer kunnen sturen.
Ondersteunde encoders kunnen ook rechtstreeks worden aangesloten op PLC's en andere computers om de onbewerkte waarden te verkrijgen en berekeningen uit te voeren binnen de software.

