Introduzione
Le applicazioni di automazione industriale richiedono spesso il rilevamento di oggetti. Esistono molti tipi di sensori progettati per rilevare la presenza di oggetti fatti di quasi tutti i materiali.
I sensori ad effetto Hall sono appositamente progettati per rilevare oggetti magnetici. Si trovano spesso nelle applicazioni di misurazione della velocità/posizione.
Cos'è un sensore di prossimità ad effetto Hall?
Sensori ad effetto Hall appartengono alla famiglia di sensori di prossimità. Rilevano la presenza utilizzando l'ampiezza del campo magnetico creato da un oggetto. Il principio di effetto Hall viene utilizzato per rilevare la presenza e l'intensità di un campo magnetico.

I sensori ad effetto Hall possono rilevare qualsiasi oggetto magnetico che abbia la polarità corretta e una forza sufficiente. Questo include elettromagneti e magneti permanenti come neodimio magneti.
I sensori di Hall sono utilizzati in applicazioni di rilevamento di posizione, prossimità e velocità. Ad esempio, le automobili moderne utilizzano sensori ad effetto hall per calcolare la velocità del veicolo, la posizione dell'albero motore e la velocità.
Uno dei sistemi più popolari che utilizzano sensori ad effetto hall è il Freno antibloccaggio (ABS) sistemi nei veicoli. Nelle applicazioni di automazione, i sensori di hall trovano i loro utilizzi in controllo del motore e persino Rilevamento della corrente CC.
Come funziona un sensore di prossimità ad effetto Hall?
I sensori ad effetto Hall sono costituiti principalmente da un sottile pezzo di semiconduttore rettangolare. Il semiconduttore è spesso costituito da arseniuro di gallio (GaAs), arseniuro di indio (InAs) o antimoniuro di indio (InSb).
Una corrente continua può passare sempre attraverso questo conduttore. Quando un magnete viene posizionato vicino a questo sottile semiconduttore, interrompe il flusso di corrente deviando i portatori di carica nel semiconduttore.
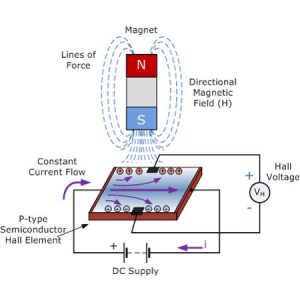
Questo fenomeno provoca la formazione di una differenza di tensione, perpendicolare al flusso di corrente e attraverso il semiconduttore. Questo è mostrato nell'immagine sopra come cariche positive e negative.
Questa tensione è chiamata Tensione di sala, prende il nome dal fisico Edwin Herbert Hall chi l'ha scoperto. Per generare una differenza di tensione misurabile, il magnete deve essere:
- Le linee di flusso magnetico dovrebbero essere perpendicolari
- Il polo verso il sensore dovrebbe avere la polarità corretta. Questo è spesso il Polo Sud del magnete.
Un tipico sensore ad effetto Hall ha il seguente diagramma a blocchi che rappresenta la funzionalità del suo circuito.
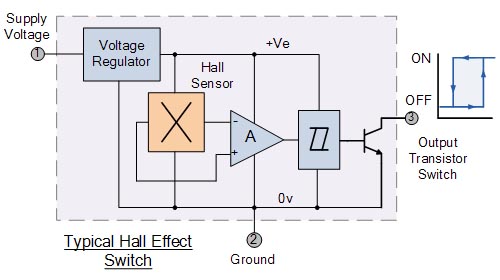
Il regolatore di tensione fornisce una tensione regolare e stabile per il sensore, l'amplificatore e altri componenti.
Quando un oggetto magnetico viene posizionato vicino al sensore, la tensione di Hall aumenta. L'amplificatore amplifica questa differenza per alimentare il trigger schmitt per fornire un'uscita pulita e priva di jitter.
Quando il segnale amplificato supera una certa soglia, viene attivato lo schmitt trigger. Il segnale dal trigger di Schmitt attiva il transistor.
Il transistor funziona come dispositivo di commutazione dell'uscita, che attiva o disattiva l'uscita. Il componente dello stadio di uscita dipende dal tipo di uscita del sensore.
Può essere un transistor (NPN/PNP), un relè o anche il segnale analogico grezzo che rappresenta la forza del campo magnetico.
Quali sono i tipi di sensori ad effetto Hall?
I sensori ad effetto Hall possono essere classificati in diversi modi.
- Sensori ad effetto Hall bipolari e unipolari
- I sensori bipolari sono anche conosciuti come tipi "a scatto". Le loro uscite si attivano quando è presente un campo magnetico positivo (polo sud). Per spegnere/rilasciare l'uscita, dovrebbe essere applicato un campo negativo (polo nord).
- I sensori unipolari accendono l'uscita quando è presente un polo sud magnetico e disattivano la sua uscita quando il magnete viene rimosso.
- Uscite digitali e analogiche
- I sensori di tipo con uscita digitale emettono un'uscita logica ALTA o BASSA mentre i sensori analogici emettono una gamma di valori come 0-5V o 4-20mA.
Qual è la portata di un sensore ad effetto Hall?
I sensori di Hall hanno un range operativo tipico di circa 0-40mm. Tuttavia, questo dipende anche direttamente dalla densità del flusso magnetico dell'oggetto.
I magneti più potenti hanno maggiore influenza e possono attivare il sensore a una distanza relativamente maggiore. I magneti più deboli dovrebbero essere posizionati molto vicino al sensore per attivarlo.
Qual è la differenza tra un sensore Hall e un sensore induttivo?
La principale differenza tra questi due sensori è il modo in cui rilevano gli oggetti. I sensori di prossimità induttivi generano il proprio campo magnetico e monitorano la variazione del campo per rilevare gli oggetti.
Ciò significa che il sensore monitora il cambiamento nel proprio campo magnetico da oggetti esterni.
I sensori ad effetto Hall monitorano i campi magnetici esterni. Richiedono che l'oggetto rilevato crei il proprio campo magnetico. Pertanto i sensori ad effetto hall possono rilevare solo magneti permanenti ed elettromagneti.
I sensori di prossimità induttivi possono rilevare molti tipi di metalli come ferro, rame e alluminio.
I sensori di prossimità ad effetto Hall sono soggetti a interferenze magnetiche. I sensori di prossimità induttivi sono relativamente tolleranti a queste interferenze. Tuttavia, le prestazioni di entrambi i sensori possono essere influenzate da temperature estreme e dall'accumulo di chip.
Se si considera la complessità dell'installazione, i sensori induttivi sono relativamente più facili da installare perché possono utilizzare parte della macchina come oggetto da rilevare (ovvero rilevamento del limite).
I sensori di Hall richiedono uno speciale attacco magnetico da fissare alla macchina diverso dal sensore stesso (es. rilevamento della velocità della ruota).
Come utilizzare un sensore ad effetto Hall con Arduino
Simile ai sensori di prossimità industriali, ne esistono versioni in miniatura disponibili sul mercato. Gli US5881/US1881 sono alcuni dei più diffusi sensori ad effetto hall compatibili con 5V.
Ciò significa che possiamo integrarli facilmente con un Arduino per rilevare oggetti magnetici.
L'immagine sotto mostra il cablaggio tipico di un US1881 a un arduino. Il resistore da 10k funge da a resistenza di pull-up per fornire un input stabile ad Arduino quando non viene rilevato alcun oggetto.
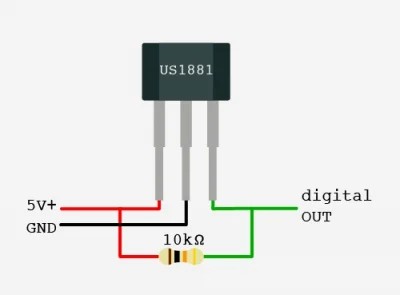
Il pin di uscita dell'US1881 può essere collegato a qualsiasi pin digitale dell'Arduino. Se il sensore viene utilizzato per misurare la velocità di una ruota, può essere utile utilizzare un perno che supporti gli interrupt esterni.
In questo esempio, l'uscita del sensore Hall è collegata al pin 2 di Arduino Uno.
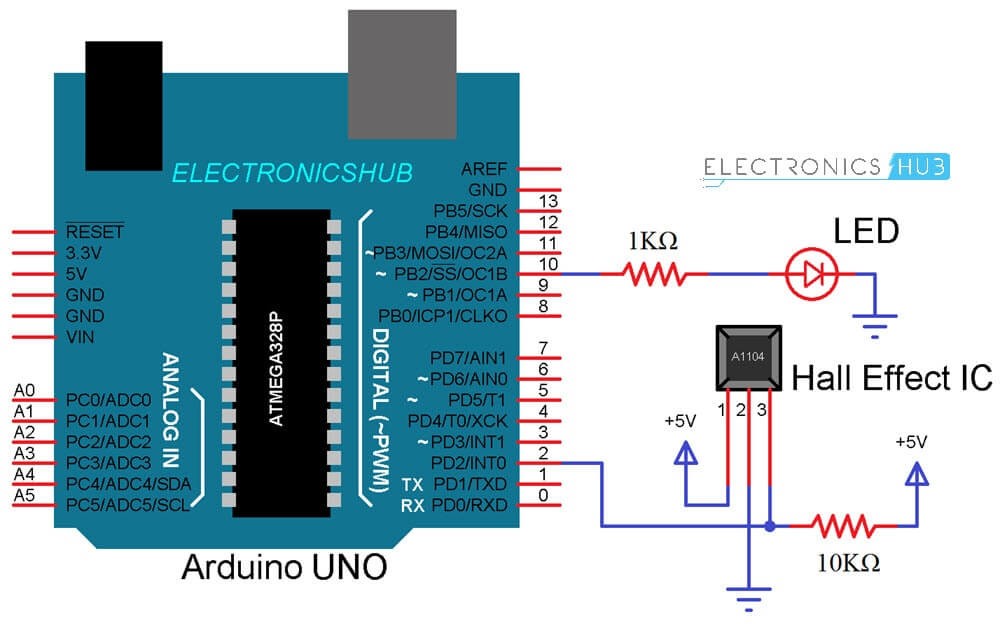
| const int ledPin = 10; const int hallPin = 2; nulla flessibile.() { modalità pin(LEDPin,USCITA); pinMode(hallPin,INPUT); } nulla loop() { if(digitalRead(hallPin) == BASSO){ digitalWrite(LEDPin, ALTO); } altro { digitalWrite(ledPin, BASSO); } } |
Questo Arduino monitora costantemente lo stato dell'uscita del sensore Hall. Quando un magnete viene posizionato vicino al sensore, emette un segnale logico LOW.
L'Arduino lo monitora e se il segnale è BASSO, accende il LED. Quando non è presente alcun magnete, l'uscita del sensore di hall è logica ALTA. Osservando ciò, Arduino spegne il LED.
Conclusione
In questo articolo abbiamo discusso di cosa sono i sensori di prossimità ad effetto Hall, come funzionano e le loro applicazioni. I sensori ad effetto Hall sono estremamente utili in applicazioni ad alta velocità come il rilevamento della velocità.
A seconda dell'applicazione, possono esserci anche alternative migliori come sensori di prossimità induttivi, ottici o capacitivi.

