Dalam aplikasi industri, terkadang diperlukan pengukuran posisi atau kecepatan benda yang berputar seperti roda atau poros/poros. Rotary encoder adalah perangkat elektromekanis yang dapat digunakan untuk mendapatkan pengukuran ini.
Ada dua jenis encoder putar: encoder putar tambahan dan rotary encoder mutlak. Dalam artikel ini, kita akan melihat encoder putar tambahan, prinsip kerja dan aplikasinya.
Apa itu Rotary Encoder Inkremental?
Encoder inkremental milik keluarga encoder putar. Mereka digunakan untuk mendapatkan informasi seperti:
- Posisi
- Sudut
- Kecepatan Rotasi

Rotary encoder inkremental ditemukan terutama dalam aplikasi di mana pengukuran kecepatan/kecepatan sudut diperlukan. Hal ini dilakukan dengan menghitung jumlah pulsa per satuan waktu yang dihasilkan oleh encoder.
Tidak seperti saudaranya, encoder putar absolut, enkoder inkremental tidak dapat memberikan informasi saat poros tidak berputar. Mereka hanya dapat memberikan informasi tentang gerakan dari poros.
Pulsa yang dihasilkan oleh encoder putar tambahan harus dihitung dan diproses di tempat lain. Ini bisa berupa mikrokontroler atau PLC (Programmable Logic Controller). Menggunakan hitungan pulsa, pengontrol kemudian dapat mengubah informasi menjadi informasi seperti posisi, kecepatan dan jarak.
Bagaimana Cara Kerja Rotary Encoder Inkremental?
Rotary encoder inkremental hadir dalam dua konfigurasi:
- Encoder inkremental saluran tunggal
- Encoder saluran ganda (Quadrature)
Fungsionalitas mereka hampir mirip satu sama lain. Namun, enkoder saluran ganda memungkinkan kami mendeteksi arah rotasi yang tidak dapat dilakukan oleh pembuat enkode saluran tunggal.
Prinsip fungsional dari rotary encoder inkremental cukup mudah. Sensor terdiri dari disk yang berputar dan ditempatkan pada porosnya.
Ketika poros berputar, piringan juga berputar seperti yang ditunjukkan pada gambar di bawah ini. Ini juga dikenal sebagai 'roda kode'.
Slot di roda digunakan untuk menghasilkan 'pulsa' setiap kali slot sejajar dengan sensor. Rotary encoder inkremental menggunakan teknologi seperti: magnetik, optik, induktif, kapasitif dan laser untuk menghasilkan ini kereta denyut nadi.
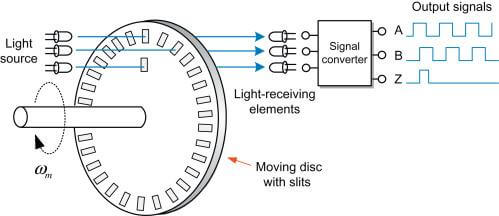
Diagram di atas mengilustrasikan pengoperasian enkoder putar inkremental optik. Sebuah sumber cahaya (LED) ditempatkan di disk dan perangkat penerima (fotodioda/fototransistor) ditempatkan di garis pandang.
Ketika disk berputar, slot sesaat memungkinkan cahaya melewatinya. Pada saat ini, berkas cahaya mencapai penerima, dan mengeluarkan sinyal logika TINGGI.
Ketika piringan berputar lebih jauh, berkas cahaya terhalang dan penerima tidak menerima berkas itu. Ini menyebabkan output dari saluran yang sesuai menjadi logika RENDAH.
Rotary encoder inkremental saluran ganda memiliki dua saluran ini bernama saluran A dan B. Penempatan slot untuk saluran B sedikit diimbangi dari slot untuk saluran A.
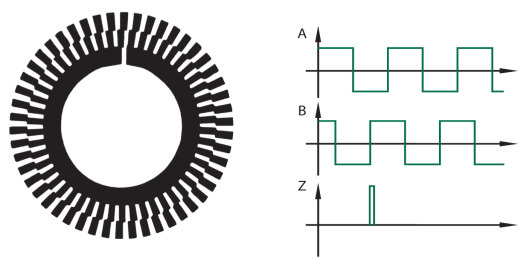
Kadang-kadang, sensor menggunakan satu set slot dan penerima ditempatkan di offset.
Pengaturan khusus ini memungkinkan output A dan B menjadi 'di luar fase'.
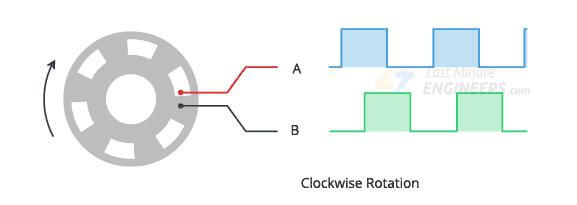
Mikrokontroler atau PLC dapat memonitor kedua saluran untuk mendeteksi arah putaran.
Tergantung pada saluran mana (A atau B) yang menunjukkan sisi naik terlebih dahulu, arahnya juga dapat dideteksi. Encoder saluran tunggal hanya memiliki keluaran saluran A dan hanya dapat mengeluarkan satu rangkaian pulsa.
Misalnya, pada diagram di atas, tepi naik di A setelah tepi naik di B menunjukkan bahwa roda berputar berlawanan arah jarum jam. Demikian pula, tepi naik di B setelah tepi naik di A menunjukkan bahwa roda/poros berputar searah jarum jam.
Pada beberapa sensor, ada saluran ketiga yang disebut 'Z'. Berbeda dengan dua saluran lainnya, biasanya hanya ada satu slot untuk saluran ini. Ini digunakan untuk menghasilkan satu pulsa per putaran untuk tugas-tugas seperti kepulangan dan verifikasi penghitungan pulsa.
Incremental vs. Encoder Absolut
Encoder tambahan hanya dapat bekerja ketika poros berputar.
Sistem yang menggunakan enkoder putar inkremental harus memiliki program canggih yang berjalan untuk menghitung pulsa yang dihasilkan sensor untuk menentukan posisi poros. Mereka memiliki disk slotted sama-spasi yang bertindak sebagai codewheel.
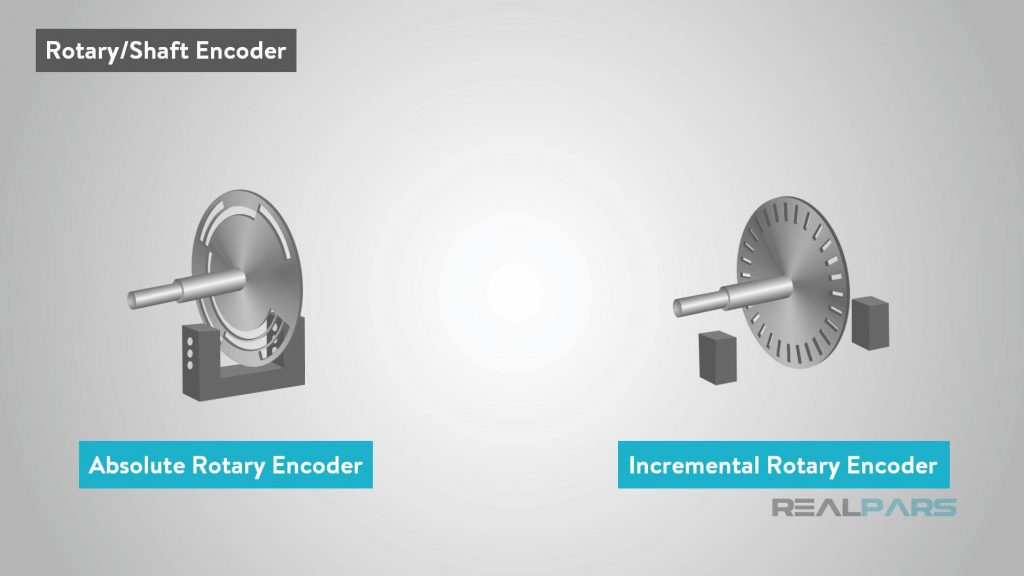
Pembuat enkode absolut memiliki roda kode khusus. Ini berisi pola slot yang tidak seragam, kode unik untuk setiap posisi poros.
Untuk setiap posisi poros tertentu, rotary encoder absolut mengeluarkan kode biner unik yang secara akurat menggambarkan posisi. Ini juga mempertahankan output bahkan ketika dimatikan karena codewheel itu sendiri berisi pola.
Encoder inkremental perlu dinyalakan setiap saat untuk menghasilkan rangkaian pulsa secara konstan untuk perhitungan kecepatan dan jarak. Namun, encoder absolut dapat dihidupkan saat diperlukan untuk mendapatkan pembacaan.
Dari segi kompleksitas, encoder inkremental lebih sederhana daripada rekan absolutnya. Oleh karena itu, enkoder inkremental lebih murah daripada enkoder putar absolut.
Untuk Apa Incremental Encoder Digunakan?
Rotary encoder inkremental menemukan aplikasinya mulai dari peralatan rumah tangga hingga mobil hingga aplikasi otomasi industri.
Salah satu aplikasi paling populer untuk penginderaan posisi adalah kenop kontrol pada peralatan elektronik seperti pengaturan radio mobil. Kenop putar dapat disesuaikan tanpa batas, dan hanya berfungsi saat perangkat dihidupkan.
Pada hari-hari sebelumnya, mouse komputer elektromekanis juga menggunakan sensor ini untuk melacak posisi di sepanjang dua sumbu.
Dalam aplikasi industri, encoder inkremental digunakan untuk mengukur kecepatan sistem mekanis. Ini sangat berguna dalam sistem kontrol gerak seperti konveyor material, lengan robot, dan mesin CNC.
Spesifikasi Encoder Tambahan
Saat memilih encoder untuk aplikasi tertentu, ada beberapa faktor yang perlu dipertimbangkan.
- diameter luar
- Diameter luar rumah sensor (berguna saat pemasangan)
- Jenis dan diameter poros
- Ada pilihan untuk jenis poros seperti poros berongga, poros setengah berongga, poros berongga buta dan melalui lubang.
- Diameter harus berada dalam toleransi untuk dipasangkan dengan objek dengan benar. Tersedia poros 20mm, 25mm dan 30mm.
- Cara outlet dan panjang kabel
- Posisi sambungan kabel keluaran. Ada dua konfigurasi: samping dan keluar.Konfigurasi samping memungkinkan koneksi kabel yang dapat dilepas di samping. Jenis kabel keluar memiliki kabel tetap yang keluar dari bagian belakang rumah sensor.
- Untuk kabel tetap, sensor biasanya dilengkapi dengan kabel berwarna hitam 2M.
- Suplai tegangan
- Menunjukkan tegangan operasi maksimum sensor. Ada opsi untuk suplai DC %v (tetap), 5-12V, 12-24V, dan 24V (tetap).
- Jenis sinyal keluaran
- A untuk encoder saluran tunggal, A dan B untuk encoder saluran ganda (kuadrat) dan Z opsional untuk output pulsa indeks
- Hitungan nadi
- Parameter ini menjelaskan nilai pulses per revolution (PPR) dan counter per revolution (CPR) yang didukung oleh sensor.
- Metode keluaran sinyal
- Jenis sinyal keluaran: keluaran tegangan (V)/arus (C), keluaran pelengkap (F) atau keluaran penggerak jalur (L, T)
Karakteristik Listrik Encoder Tambahan
- Suplai tegangan
- Dapat bervariasi dari 5V hingga 24V
- Konsumsi saat ini
- Untuk jenis keluaran tegangan dan arus, konsumsi arus tipikal kurang dari 60mA. Jenis driver dapat mengkonsumsi hingga 100mA.
- Tegangan keluaran (untuk jenis tegangan keluaran)
- Tegangan level TINGGI: >= 3.5V
- Tegangan level RENDAH: <= 0.5V
- Waktu naik dan turun
- Menjelaskan waktu yang dibutuhkan sensor untuk mengubah output dari tinggi ke rendah (turun) atau rendah ke tinggi (naik)
- Waktu naik khas untuk jenis keluaran tegangan: <= 500ns
- Waktu jatuh tipikal untuk tipe keluaran tegangan: <= 100ns
- Frekuensi respon
- Frekuensi maksimum sensor dapat mengganti outputnya
- Biasanya jatuh di bawah 300kHz
Sirkuit Rotary Encoder Inkremental
Seperti disebutkan sebelumnya, rotary encoder dapat dihubungkan dengan PLC atau mikrokontroler untuk mengukur kecepatan, posisi, jarak, dan arah putaran poros. Perangkat ini perlu diprogram secara khusus untuk menghitung nilai-nilai ini dan membuat keputusan.
Ada juga perangkat khusus seperti penghitung dan takometer yang dapat melakukan perhitungan ini secara langsung dan langsung menunjukkan nilainya. Mari kita lihat beberapa sirkuit yang dapat kita buat menggunakan encoder putar inkremental:
Tachometer bertenaga sendiri
Menggunakan H7ER seri self-powered tachometer oleh Omron, encoder tambahan saluran tunggal dapat digunakan untuk mengatur tachometer yang dapat menampilkan RPM poros.

Grafik E6A2 adalah encoder inkremental kuadratur tipe AB dengan output kolektor terbuka NPN. Menghubungkannya dengan H7ER, sistem bertindak sebagai takometer yang menghitung frekuensi pulsa untuk menentukan RPM poros yang terhubung.
Penghitung atas/bawah berkecepatan tinggi
Grafik K3NC adalah penghitung naik/turun berkecepatan tinggi dengan berbagai mode keluaran. Perangkat ini dapat dihubungkan dengan rotary encoder tipe AB untuk membentuk counter atas/bawah sesuai dengan arah putaran.
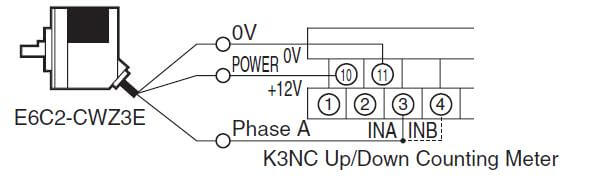
Dengan pengaturan ini, pengukur penghitung dapat dikonfigurasikan untuk mengeluarkan sinyal untuk menghidupkan/mematikan mesin yang membandingkan penghitungan pulsa. Ini juga mendukung komunikasi dengan PLC untuk aplikasi kontrol proses.
Menggunakan komponen siap pakai ini dapat menghilangkan kebutuhan akan perangkat kompleks seperti PLC yang tidak terlalu diperlukan. Ini secara khusus berguna untuk sistem skala kecil.
Untuk penggunaan dalam sistem berbasis PLC, kartu HSC (Penghitung Kecepatan Tinggi) direkomendasikan untuk aplikasi kecepatan tinggi. Gambar di bawah menunjukkan sambungan enkoder putar inkremental tipe kolektor terbuka PNP ke kartu input HSC yang digabungkan dengan PLC.
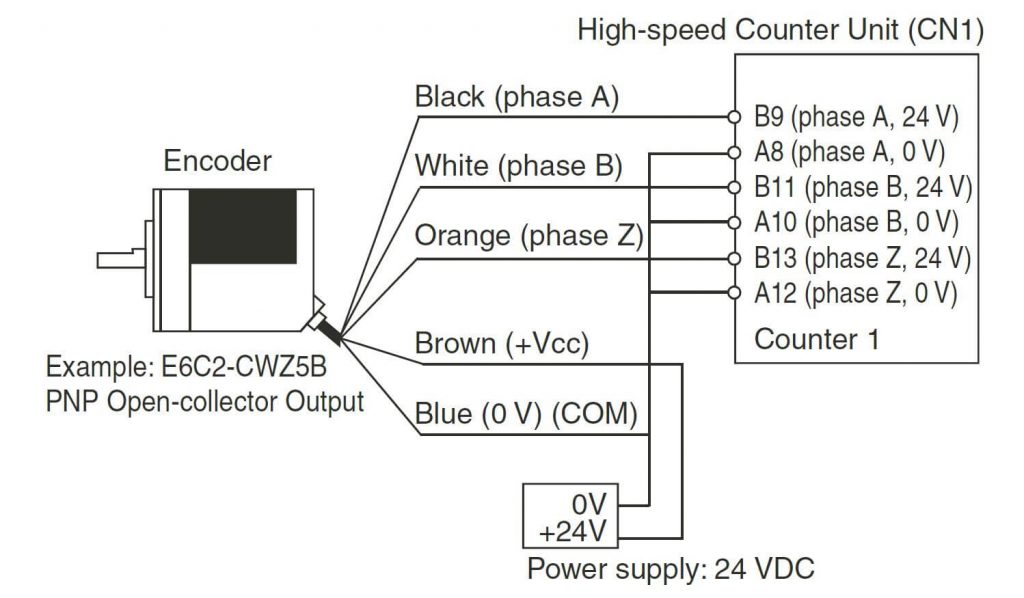
Sensor memiliki output A, B dan Z dan terhubung ke kartu HSC seperti yang ditunjukkan di atas. Kartu penghitung dapat dikonfigurasi untuk mengirim penghitung membaca kecepatan poros enkoder ke PLC. Pengaturan ini mengurangi overhead pemrosesan dalam program PLC.
Arduino Rotary Encoder Inkremental
Di sirkuit berbasis Arduino, encoder putar digunakan sebagai input ke program kami.
Kita dapat menggunakannya untuk menambah/mengurangi nilai variabel untuk tugas-tugas seperti mengontrol kecepatan motor atau kecerahan LED. Dalam aplikasi yang lebih maju, encoder putar juga digunakan untuk menavigasi menu.
KY-040 adalah modul rotary encoder siap pakai yang tersedia untuk Arduino. Ini memiliki pinout berikut:
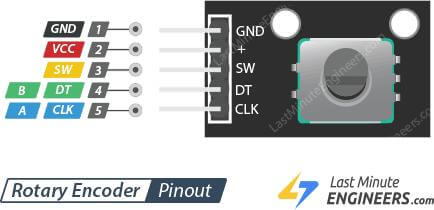
- GND – Koneksi ground
- VCC – pasokan 5V atau 3.3V
- SW – output sakelar tombol tekan (0V saat ditekan, 5V saat istirahat)
- DT – Keluaran data
- CLK – Keluaran jam
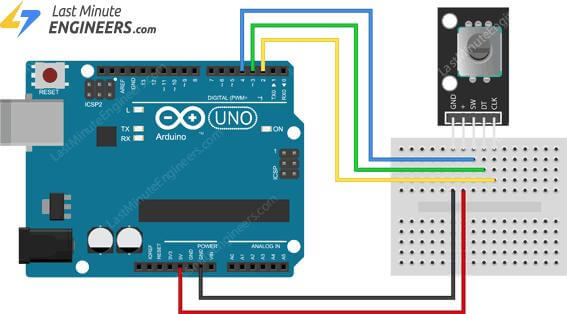
Sebagai contoh rangkaian, mari kita lihat rangkaian uji dimana encoder dihubungkan ke Arduino UNO. Pin SW dari sensor terhubung ke pin 4, CLK ke pin 2 dan DT terhubung ke pin 3 Arduino.
VCC terhubung ke +5V dan GND terhubung ke pin GND dari papan pengembangan Arduino seperti yang ditunjukkan di bawah ini.
Kode Arduino untuk Rotary Encoder
Kode contoh ini telah diadaptasi dari lastmenitengineers.com. Ia melakukan dua fungsi utama:
- Tunggu sinyal CLK (pin 2) berubah
- Amati apakah tombol ditekan (pin 4 LOW)
Ketika kenop encoder diputar, program mendeteksi perubahan pada garis CLK. Kemudian memeriksa status pin DT.
Jika keduanya sama, encoder diputar searah jarum jam dan berlawanan arah jarum jam jika sebaliknya. Sementara itu, untuk setiap deteksi, variabel melawannilainya juga bertambah/berkurang tergantung pada arahnya.
Program juga memeriksa status tombol encoder. Jika ditekan, program akan mencetak 'tombol ditekan' ke serial monitor. Itu juga mencetak nilai saat ini dari jumlah pulsa yang dihitung.
| // Masukan Rotary Encoder #menetapkan KLK 2 #menetapkan DT 3 #menetapkan SW 4int penghitung = 0; int CLK negara saat ini; int statusCLK terakhir; String currentDir = “”; unsigned panjang lastButtonPress = 0;membatalkan penyiapan() { // Tetapkan pin encoder sebagai input // Siapkan Monitor Serial // Baca status awal CLK membatalkan lingkaran() { // Baca status CLK saat ini // Jika status CLK terakhir dan saat ini berbeda, maka terjadi pulsa // Jika status DT berbeda dari status CLK, maka Serial.print(“Arah: “); // Ingat status CLK terakhir // Baca status tombol //Jika kami mendeteksi sinyal RENDAH, tombol ditekan // Ingat acara tekan tombol terakhir // Beri sedikit penundaan untuk membantu mengurangi pembacaan |
Cara Memeriksa Encoder Inkremental dengan Multimeter
Untuk memecahkan masalah encoder dengan multimeter, multimeter harus dihidupkan. Setelah dihidupkan, atur multimeter ke mode pengukuran volt DC, dan hubungkan probe hitam dengan kabel GND sensor.
Putar poros sensor secara perlahan sambil memeriksa output A atau B dari sensor.
Pengukuran tegangan harus berfluktuasi antara mendekati 0V dan VCC sensor. Perhatikan bahwa poros harus berputar sangat lambat untuk memungkinkan multimeter menstabilkan pembacaannya.
Jika pengukuran tegangan tidak berubah, alihkan multimeter ke mode AC dan ulangi pengukuran yang sama. Kali ini, putar poros lebih cepat. Jika pembacaan dari multimeter menunjukkan tegangan bukan nol, dapat disimpulkan bahwa encoder berfungsi.
Namun, ini bukan metode pemecahan masalah yang 100% akurat. Meskipun multimeter menampilkan pembacaan tegangan, sensor mungkin masih tidak berfungsi. Dalam hal ini, waktu sensor perlu dianalisis. Untuk tugas seperti itu, osiloskop diperlukan.
Kesimpulan
Pada artikel ini, kami membahas operasi, prinsip kerja, dan aplikasi encoder putar inkremental.
Sementara enkoder inkremental adalah yang paling populer, enkoder putar absolut dapat bermanfaat dalam kasus tertentu. Pilih sensor yang paling cocok untuk aplikasi Anda dengan mempertimbangkan karakteristik yang telah kita bahas di artikel ini.
Ini tidak hanya akan meningkatkan kinerja dan keandalan sistem Anda, tetapi juga akan mengurangi biaya yang tidak perlu.

