Rotary encoder adalah perangkat elektromekanis yang digunakan untuk memantau objek yang berputar seperti poros dan gandar. Rotary encoder dapat digunakan untuk mengukur posisi, jarak dan kecepatan sudut dari poros yang berputar.
Ada dua jenis encoder putar: encoder putar tambahan dan rotary encoder mutlak. Dalam artikel ini, kita akan melihat encoder putar absolut, prinsip kerja dan aplikasinya.
Apa itu Encoder Rotary Mutlak?
Rotary encoder mutlak milik keluarga encoder putar. Mereka digunakan untuk mengukur parameter berikut dari objek yang berputar seperti poros atau gandar:
- Kecepatan sudut
- Informasi posisi
- Jarak

Rotary encoder mutlak ditemukan dalam aplikasi di mana pengukuran posisi dan perpindahan sudut yang tepat diperlukan. Sensor ini juga menemukan aplikasinya dalam sistem di mana kecepatan rotasi harus diukur.
Sensor ini mengeluarkan kata unik (kata adalah a kumpulan bit) Menurut posisi saat ini dari sensor.
Ini berbeda dari enkoder putar inkremental karena enkoder inkremental dirancang untuk menghasilkan a aliran terus menerus dari pulsa di mana-mana sementara pembuat enkode absolut mengeluarkan a set unik bit per setiap posisi dari sensor.
Hal ini memungkinkan kita untuk mengukur posisi tepat (mutlak) poros daripada menghitung perubahan posisi.
Mari kita lihat secara mendalam cara kerja rotary encoder absolut.
Prinsip Kerja Rotary Encoder Absolut
Rotary encoder absolut, jika dibandingkan dengan rotary encoder inkremental, agak rumit dalam pengoperasiannya, tetapi mudah digunakan dalam aplikasi.
Mirip dengan enkoder putar inkremental, enkoder absolut juga memiliki poros berputar yang terpasang pada sensor. Poros terhubung ke disk dengan satu set slot yang ditempatkan dengan hati-hati. Roda ini juga dikenal sebagai 'roda kode'.
Roda kode memiliki pola bit yang unik. Tidak seperti encoder inkremental di mana semua slot ditempatkan dalam pola berulang, slot codewheel encoder absolut berbeda satu sama lain.
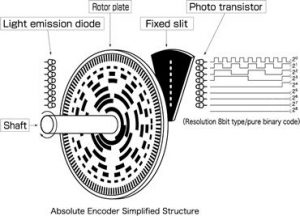
Saat poros berputar, roda kode juga ikut berputar. Ada satu set LED yang memancarkan sinar cahaya ke codewheel. Ketika berkas cahaya sejajar dengan slot, berkas melewati codewheel, celah tetap dan menerangi fototransistor.
Ada encoder absolut magnetik yang menggantikan array LED dengan array penginderaan magnetik dan satu set kutub magnet menggantikan penanda optik.
Setiap fototransistor bekerja secara independen dan ketika diterangi, mereka mengeluarkan sinyal logika TINGGI. Ketika tidak ada sinar yang hadir pada fototransistor tertentu, ia mengeluarkan logika LOW.
Jumlah phototransistor dan level slot yang terukir di codewheel menentukan akurasi dan resolusi dari rotary encoder absolut.
Hal ini biasanya dinyatakan dalam bit. Misalnya, encoder absolut resolusi 8-bit dapat memberikan 256 informasi posisi, dan dapat mengukur perpindahan sudut dengan peningkatan 1.41 derajat.
Bergantung pada jenis encoder absolut dan konstruksinya, ada beberapa konfigurasi output yang tersedia:
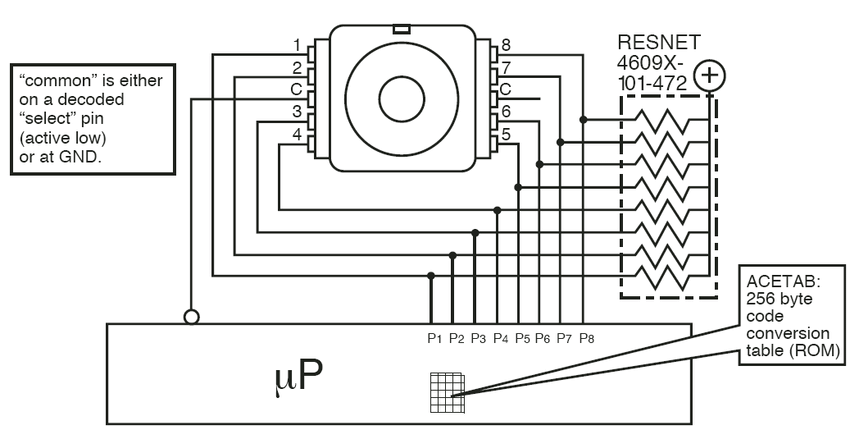
- Output paralel
- Jenis sensor ini memiliki beberapa jalur keluaran yang memberikan informasi posisi. Misalnya, sensor output paralel 8-bit memiliki 8 jalur sinyal dan dua kabel catu daya. Outputnya dapat dikodekan dalam biner or kode abu-abu Format.
- Sensor output paralel memiliki jumlah sirkuit built-in yang sangat minim karena tidak melibatkan banyak pemrosesan.
- Keluaran serial
- Encoder absolut keluaran serial mengeluarkan informasi posisi dan kecepatan melalui protokol transmisi data sinkron.
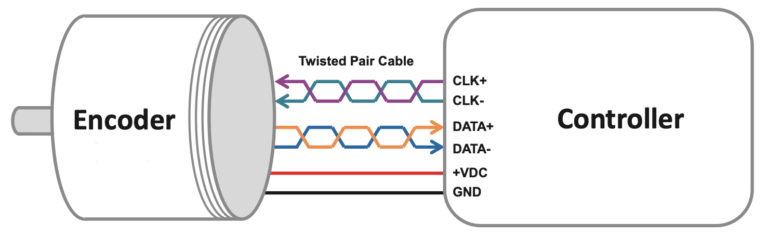
- Sensor keluaran serial memiliki data dan garis jam, dan mengeluarkan satu bit per setiap pulsa jam. Sensor ini juga datang dalam format keluaran kode biner atau abu-abu.
- Untuk kekebalan kebisingan tambahan, sensor tipe keluaran serial menggunakan komunikasi pasangan diferensial sesuai kebutuhan RS-422 standar. Satu pasang per jam dan satu lagi untuk jalur data.
- Metode komunikasi sinkron paling populer untuk encoder absolut adalah SSI: Antarmuka Serial Sinkron, BiSS: Antarmuka Serial Sinkron Dua Arah dan DSL Hiperface. Ada juga antarmuka berpemilik seperti Akhir2.2.
- Analog Output
- Sensor output analog mengeluarkan tegangan atau nilai arus tergantung pada posisi sensor.
Keuntungan dari Encoder Absolut
Encoder absolut, meskipun biayanya sedikit lebih tinggi, memiliki banyak keuntungan dalam hal penginderaan posisi:
- Menampilkan posisi absolut poros
- Saat 'disurvei', pembuat enkode absolut mengeluarkan informasi posisi unik yang terkait dengan posisinya saat ini. Ini berarti bahwa tidak ada dua posisi poros dalam putaran 360 derajat yang identik.
- Beberapa opsi keluaran
- Encoder absolut memiliki beberapa tipe output: paralel, serial (protokol standar dan kepemilikan)
- Kebal terhadap kegagalan daya
- Encoder mutlak tidak mengalami kegagalan daya. Mereka selalu siap memberikan informasi pemosisian tepat setelah siklus daya.
- Resolusi tinggi
- Dengan hanya meningkatkan jumlah track encoder dan unit penginderaan, encoder absolut dapat memiliki resolusi yang jauh lebih tinggi daripada encoder inkremental.
Incremental vs. Encoder Absolut
Perbedaan utama antara encoder absolut dan inkremental adalah operasinya. Encoder absolut dapat memberikan informasi posisi bahkan ketika poros tidak berputar.
Encoder tambahan hanya dapat memberikan pulsa ketika poros berputar. Hitung nadi terpisah harus dilakukan untuk menentukan posisi dan jarak relatif.
Encoder tambahan harus memiliki penanda 'homing' terpisah untuk menentukan posisi awal/referensi poros. Namun, encoder absolut tidak memerlukan penambahan seperti itu dan dapat memberikan posisi langsung ke rumah poros.
Ini bisa sangat berguna dalam aplikasi di mana memutar poros untuk mendapatkan posisi 'rumah' tidak diinginkan.
Encoder tambahan memerlukan modul dekoder berkecepatan tinggi khusus untuk mendapatkan informasi kecepatan, posisi, dan jarak. Ini membatasi integrasi dengan perangkat elektronik selain PLC dan mikrokontroler. Terkadang biaya pemrosesan juga dapat berdampak negatif pada kinerja sistem.
Sensor absolut memiliki resolusi keseluruhan yang lebih tinggi daripada sensor inkremental. Resolusi encoder inkremental terbatas pada ukuran fisik disk dan respons frekuensi sistem.
Encoder absolut selalu siap memberikan informasi posisi sesuai permintaan, sedangkan encoder inkremental harus terus dipantau untuk mendapatkan rangkaian pulsa dan menghitung kecepatan, arah, dan jarak saat ini. Karena ini, encoder absolut dapat pulih dari kegagalan daya dengan mudah.
Aplikasi Encoder Absolut
Encoder absolut terutama digunakan dalam aplikasi pemosisian presisi tinggi seperti,
- Mesin CNC multi-sumbu (perakitan dan manufaktur)
- Lengan robot (robot bedah, pencitraan diagnostik)
- Sistem pemosisian elevator
- Aplikasi pencetakan
- Industri motorsport (sistem steer-by-wire) dan banyak lagi.
Output Encoder Mutlak
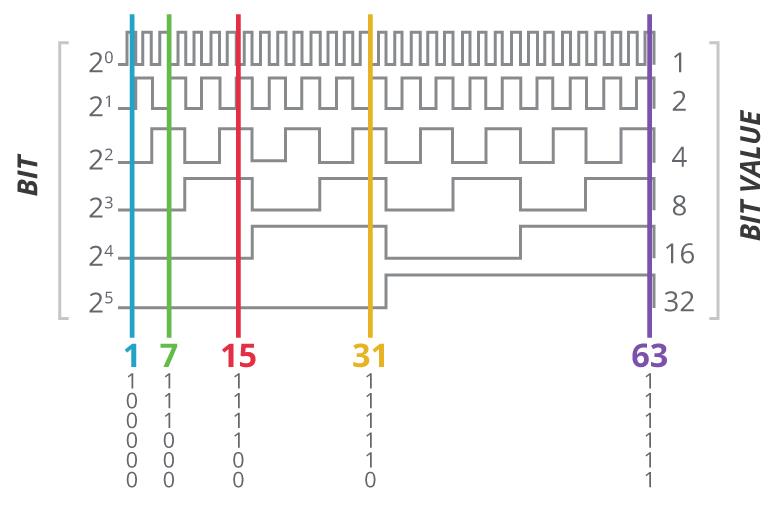
Encoder absolut mengeluarkan satu set bit yang disebut 'kata' untuk setiap posisi poros. Ada tiga jenis output untuk encoder absolut: paralel, serial dan analog.
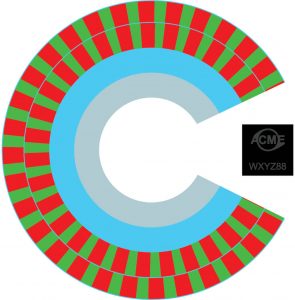
Encoder keluaran paralel memiliki n-jumlah kabel (n=jumlah bit (resolusi)) yang mengeluarkan bit kata yang sesuai. Gambar yang ditunjukkan di bawah ini menunjukkan output encoder absolut kata 6-bit. Kata keluaran dapat berupa kode abu-abu or biner Format.
Encoder keluaran serial mengeluarkan aliran data saat 'disurvei'. Sensor ini memiliki rangkaian pemrosesan sinyal berbasis mikrokontroler built-in. Ada sistem bus serial seperti SSI, BiSS, EnDat, Modbus dan Profibus yang memungkinkan perangkat yang didukung untuk berkomunikasi dengan sensor.
Sensor output analog mengeluarkan sinyal tegangan atau arus tergantung pada posisi sensor.
Jenis Encoder Absolut
Encoder absolut dapat dikategorikan berdasarkan teknologi penginderaan sebagai: optik dan magnetis. Encoder optik menggunakan cahaya tampak (LED) dan codewheel slotted.
Encoder magnetik menggunakan kutub magnet dan susunan penginderaan magnet untuk mendapatkan posisi codewheel saat ini.
Klasifikasi lainnya didasarkan pada jenis output. Ada encoder absolut satu putaran dan banyak putaran. Encoder absolut satu putaran hanya dapat memberikan informasi pemosisian dalam satu putaran 260 derajat.
Encoder multi-putaran menyediakan data tambahan yang menyediakan jumlah putaran 360 derajat yang telah diputar poros. Ini membantu untuk menentukan jumlah putaran tanpa harus menghitung sejak awal.
Encoder Absolut Satu Putaran vs. Multi Putaran
Tergantung pada ketersediaan fungsi khusus untuk menghitung putaran, ada dua jenis encoder absolut: Encoder absolut satu putaran dan Multi putaran.
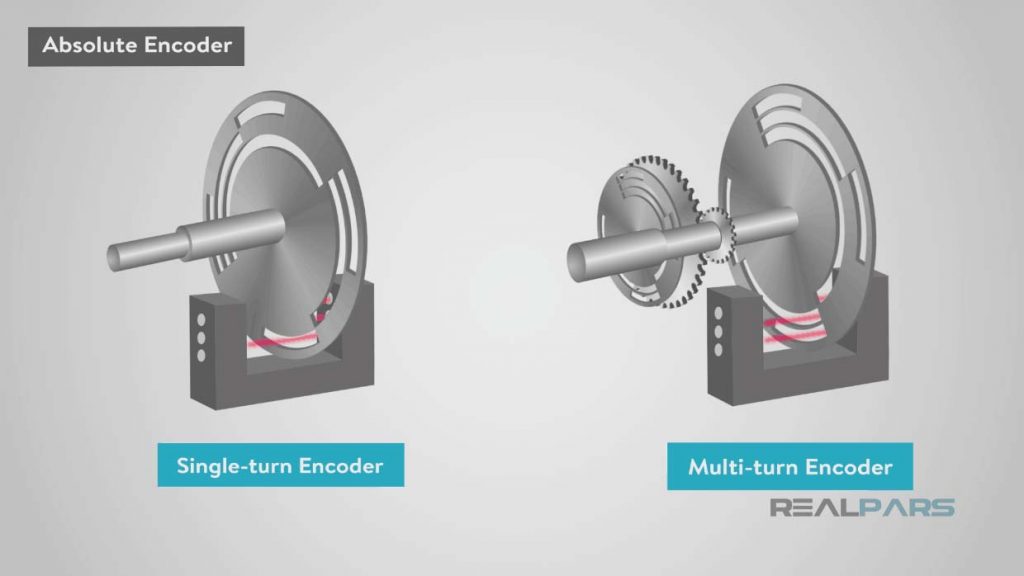
Encoder absolut satu putaran dapat mengukur posisi dalam satu putaran.
Misalnya, jika satu putaran mutlak encoder berputar 360 derajat dari posisi awal, dan mencapai derajat 361 rotasi, sensor akan memulai output dari awal. Ini akan menunjukkan posisi sebagai 1 derajat.
Sensor ini tidak dapat menghitung atau memberikan sinyal khusus saat putaran melebihi putaran penuh. Misalnya, Sensor seri 845G oleh Allen Bradley memiliki output 12-bit, 0 sebagai minimum dan 4095 sebagai posisi maksimum. Setelah mencapai 4096, output mencapai 0.
Encoder absolut satu putaran ditemukan dalam aplikasi seperti:
- Teleskop
- Antena berputar
- Generator Turbin Angin
- Gerbang/Pintu
Encoder putaran tunggal hanya tidak memiliki fitur penghitungan putaran dan dapat digunakan untuk pengukuran kecepatan dan posisi. Jika diperlukan, posisi awal dapat digunakan sebagai referensi dan metode perangkat lunak dapat digunakan untuk menghitung perkiraan jumlah putaran.
Encoder absolut multi-putaran di sisi lain, dapat menghitung putaran juga. Misalnya, encoder absolut multi-putaran 12-bit memiliki 4096 langkah per putaran, dan juga dapat menghitung 4096 putaran. Encoder multi-putaran menggunakan salah satu teknologi berikut untuk mempertahankan hitungan revolusi:
- Tipe diarahkan
- Geared encoder menggunakan satu set roda gigi planetary untuk melacak jumlah putaran. Jenis ini memiliki kelemahan dari keausan mekanis dari waktu ke waktu.
- Jenis cadangan baterai
- Jenis ini menggunakan penghitung elektronik dan memori untuk menyimpan informasi penghitung. Mereka dapat menghitung putaran bahkan ketika dimatikan. Namun, dalam kebanyakan kasus, baterai terpasang di dalam sensor. Mungkin diperlukan untuk menggantinya dari waktu ke waktu tergantung pada frekuensi penggunaan.
- Jenis sensor Wiegand
- Wiegand-sensor jenis kawat menggunakan luka kawat khusus di dekat poros dan menggunakan pulsa magnetik untuk memicu perubahan polaritas. Perubahan ini terjadi setelah setiap revolusi selesai. Perpindahan ini digunakan untuk menghitung jumlah putaran.
Encoder multi-putaran ditemukan dalam aplikasi seperti,
- Sendi robot
- crane
- Motor Servo (360 servos)
- Sistem kontrol antena parabola dan banyak lagi di mana titik pivot rotasi tidak dapat diakses/tersedia.
Apa itu Magnetic Absolute Encoder?
Encoder absolut magnetik menggunakan kutub magnet dan sensor magnetik alih-alih LED dan fotodioda yang ditemukan di encoder optik. Gambar di bawah ini menunjukkan contoh roda encoder magnetik berkode absolut.
Susunan kutub luar memiliki satu kutub magnet lebih banyak daripada susunan dalam. Hal ini menyebabkan pasangan kutub dalam dan luar memiliki offset yang unik.
Sensor mengambil sinyal dari satu kutub per roda pada satu waktu, dan menghitung perbedaan fase (pergeseran fase). Perbedaan fasa analog ini kemudian diubah menjadi nilai digital untuk menjadi keluaran.
Encoder magnetik sangat kuat dan tahan terhadap goncangan dan getaran.
Mereka menemukan aplikasi mereka di lingkungan di mana ada polutan partikulat seperti debu, kelembaban dan partikel material lainnya dapat menumpuk. Namun, karena prinsip operasinya, encoder magnetik rentan terhadap gangguan yang disebabkan oleh medan magnet yang kuat.
Menghubungkan Encoder Absolut dengan Raspberry Pi
Meskipun menghubungkan encoder absolut dengan Raspberry Pi bisa sederhana, program untuk membaca input dengan benar bisa menjadi sedikit rumit tergantung pada jenis sensornya. Mari kita lihat bagaimana menghubungkan encoder absolut tipe output serial (EMS22A) dengan Raspberry Pi.
Menghubungkan sensor
Sensor memiliki format kabel berikut:
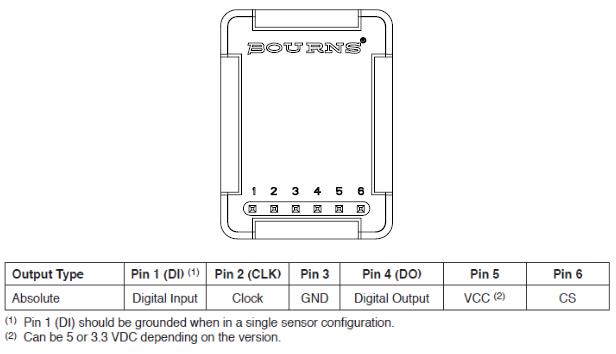
Hubungkan kabel sensor sebagai berikut dengan Raspberry Pi:
- Pin 2 (CLK) -> RPi pin 2
- Pin 4 (DO) -> RPi pin 3 (jika menggunakan lebih dari satu sensor, sambungkan pin data sensor kedua ke pin 14)
- Pin 6 (CS) -> RPi pin 4
- VCC -> RPi + 5V pin
- GND -> RPi pin GND
Kode Contoh
Untuk polling informasi dari sensor, kode contoh berikut ditulis oleh: HareshKarnan dapat digunakan. Ini akan mencetak pembacaan dari sensor yang terpasang saat dijalankan.
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
PIN_CLK = 2
PIN_DAT = [3,14]
PIN_CS = 4
delay = 0.0000005
ns = 2 # number of sensors attached
# totally 10 bits to be extracted from SSI signal
bitcount = 16
# pin setup done here
try:
GPIO.setup(PIN_CLK,GPIO.OUT)
GPIO.setup(PIN_DAT[:],GPIO.IN)
GPIO.setup(PIN_CS,GPIO.OUT)
GPIO.output(PIN_CS,1)
GPIO.output(PIN_CLK,1)
except:
print "ERROR. Unable to setup the configuration requested"
#wait some time to start
time.sleep(0.5)
print "GPIO configuration enabled"
def clockup():
GPIO.output(PIN_CLK,1)
def clockdown():
GPIO.output(PIN_CLK,0)
def MSB():
# Most Significant Bit
clockdown()
def readpos():
GPIO.output(PIN_CS,0)
time.sleep(delay*2)
MSB()
data = [0]*ns
for i in range(0,bitcount):
if i<10:
#print i
clockup()
for j in range(0,ns):
data[j]<<=1
data[j]|=GPIO.input(PIN_DAT[j])
clockdown()
else:
for k in range(0,6):
clockup()
clockdown()
GPIO.output(PIN_CS,1)
return data
try:
while(1):
print readpos()
time.sleep(0.001)
#break
finally:
print "cleaning up GPIO"
GPIO.cleanup()
Harga Encoder Mutlak
Harga rotary encoder mutlak bervariasi dari $10-15 hingga lebih dari $1000. Hal ini terutama disebabkan oleh fitur yang tersedia, resolusi, jenis output dan protokol yang digunakan. Sensor eksklusif dengan resolusi tinggi cenderung lebih mahal daripada sensor tipe output paralel sederhana yang dapat dibeli dengan biaya lebih rendah.
Kesimpulan
Rotary encoder digunakan untuk melacak komponen mekanis yang berputar seperti poros dan batang. Encoder absolut dan encoder inkremental adalah dua jenis encoder putar.
Ada perangkat antarmuka encoder khusus yang dapat membaca input mentah encoder putar dan mengeluarkan informasi kecepatan, posisi, dan jarak ke komputer.
Encoder yang didukung juga dapat langsung dihubungkan ke PLC dan komputer lain untuk mendapatkan nilai mentah dan melakukan perhitungan di dalam perangkat lunak.

