Introducción
Las aplicaciones de automatización industrial a menudo necesitan la detección de objetos. Hay muchos tipos de sensores que están diseñados para detectar la presencia de objetos hechos de casi cualquier material.
Los sensores de efecto Hall están especialmente diseñados para detectar objetos magnéticos. A menudo se encuentran en aplicaciones de medición de velocidad / posición.
¿Qué es un sensor de proximidad de efecto Hall?
Sensores de efecto Hall pertenecen a la familia de sensores de proximidad. Detectan la presencia utilizando la magnitud del campo magnético creado por un objeto. El principio de efecto Hall se utiliza para detectar la presencia e intensidad de un campo magnético.

Los sensores de efecto Hall pueden detectar cualquier objeto magnético que tenga la polaridad correcta y la fuerza suficiente. Esto incluye electroimanes e imanes permanentes como Neodimio imanes
Los sensores Hall se utilizan en aplicaciones de detección de posición, proximidad y velocidad. Por ejemplo, los automóviles modernos utilizan sensores de efecto hall para calcular la velocidad del vehículo, la posición del cigüeñal del motor y la velocidad.
Uno de los sistemas más populares que utiliza sensores de efecto Hall es el Freno antibloqueo (ABS) sistemas en vehículos. En aplicaciones de automatización, los sensores de pasillo encuentran su uso en control del motor e incluso Detección de corriente CC.
¿Cómo funciona un sensor de proximidad de efecto Hall?
Los sensores de efecto Hall consisten principalmente en una pieza delgada de semiconductor rectangular. El semiconductor suele estar hecho de arseniuro de galio (GaAs), arseniuro de indio (InAs) o antimonuro de indio (InSb).
Se permite que una corriente continua pase a través de este conductor en todo momento. Cuando se coloca un imán cerca de este semiconductor delgado, interrumpe el flujo de corriente al desviar los portadores de carga en el semiconductor.
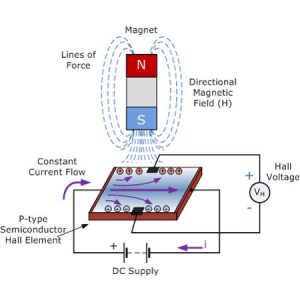
Este fenómeno hace que se acumule una diferencia de voltaje, perpendicular al flujo de corriente y a través del semiconductor. Esto se muestra en la imagen de arriba como cargas positivas y negativas.
Este voltaje se llama Voltaje de pasillo, el nombre del físico Salón Edwin Herbert quien lo descubrió. Para generar una diferencia de voltaje medible, el imán debe ser:
- Las líneas de flujo magnético deben ser perpendiculares
- El polo hacia el sensor debe tener la polaridad correcta. Esta es a menudo la Polo Sur del imán.
Un sensor de efecto Hall típico tiene el siguiente diagrama de bloques que representa la funcionalidad de su circuito.
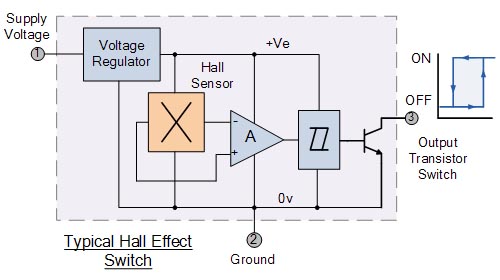
El regulador de voltaje proporciona un voltaje estable y uniforme para el sensor, el amplificador y otros componentes.
Cuando se coloca un objeto magnético cerca del sensor, el voltaje Hall aumenta. El amplificador amplifica esta diferencia para alimentar el disparador Schmitt para proporcionar una salida limpia y sin fluctuaciones.
Cuando la señal amplificada supera un cierto umbral, se activa el disparador Schmitt. La señal del disparador Schmitt activa el transistor.
El transistor funciona como el dispositivo de conmutación de salida, que enciende o apaga la salida. El componente de la etapa de salida depende del tipo de salida del sensor.
Puede ser un transistor (NPN / PNP), un relé o incluso la señal analógica sin procesar que representa la fuerza del campo magnético.
¿Cuáles son los tipos de sensores de efecto Hall?
Los sensores de efecto Hall se pueden clasificar de varias formas.
- Sensores de efecto Hall bipolares y unipolares
- Los sensores bipolares también se conocen como tipos de "enclavamiento". Sus salidas se activan cuando hay un campo magnético positivo (polo sur). Para apagar / liberar la salida, se debe aplicar un campo negativo (polo norte).
- Los sensores unipolares encienden la salida cuando hay un polo sur magnético y apagan su salida cuando se quita el imán.
- Salidas digitales y analógicas
- Los sensores de tipo de salida digital emiten una salida lógica distinta ALTA o BAJA, mientras que los sensores analógicos emiten un rango de valores como 0-5V o 4-20mA.
¿Cuál es el alcance de un sensor de efecto Hall?
Los sensores Hall tienen un rango operativo típico de aproximadamente 0-40mm. Sin embargo, esto también depende directamente de la densidad de flujo magnético del objeto.
Los imanes más fuertes tienen más influencia y pueden activar el sensor a una distancia relativamente mayor. Los imanes más débiles deben colocarse muy cerca del sensor para activarlo.
¿Cuál es la diferencia entre un sensor Hall y un sensor inductivo?
La principal diferencia entre estos dos sensores es la forma en que detectan objetos. Los sensores de proximidad inductivos generan su propio campo magnético y monitorean el cambio del campo para detectar objetos.
Esto significa que el sensor monitorea el cambio en su propio campo magnético por objetos externos.
Los sensores de efecto Hall monitorean los campos magnéticos externos. Requieren que el objeto que se detecta cree su propio campo magnético. Por lo tanto, los sensores de efecto Hall solo pueden detectar imanes permanentes y electroimanes.
Los sensores de proximidad inductivos pueden detectar muchos tipos de metales como hierro, cobre y aluminio.
Los sensores de proximidad de efecto Hall son susceptibles a interferencias magnéticas. Los sensores de proximidad inductivos son relativamente tolerantes a estas interferencias. Sin embargo, el rendimiento de ambos sensores puede verse afectado por temperaturas extremas y acumulación de viruta.
Al considerar la complejidad de la instalación, los sensores inductivos son relativamente más fáciles de instalar porque pueden usar parte de la máquina como un objeto de detección (es decir, detección de límites).
Los sensores Hall requieren que se conecte a la máquina un accesorio magnético especial que no sea el sensor en sí (es decir, detección de velocidad de la rueda).
Cómo utilizar un sensor de efecto Hall con Arduino
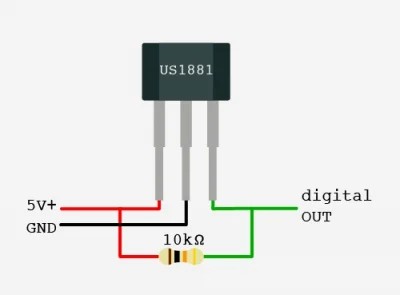
Al igual que los sensores de proximidad industriales, existen versiones en miniatura de ellos disponibles en el mercado. Los US5881 / US1881 son algunos de los sensores de efecto Hall más populares que son compatibles con 5V.
Esto significa que podemos integrarlos fácilmente con un Arduino para detectar objetos magnéticos.
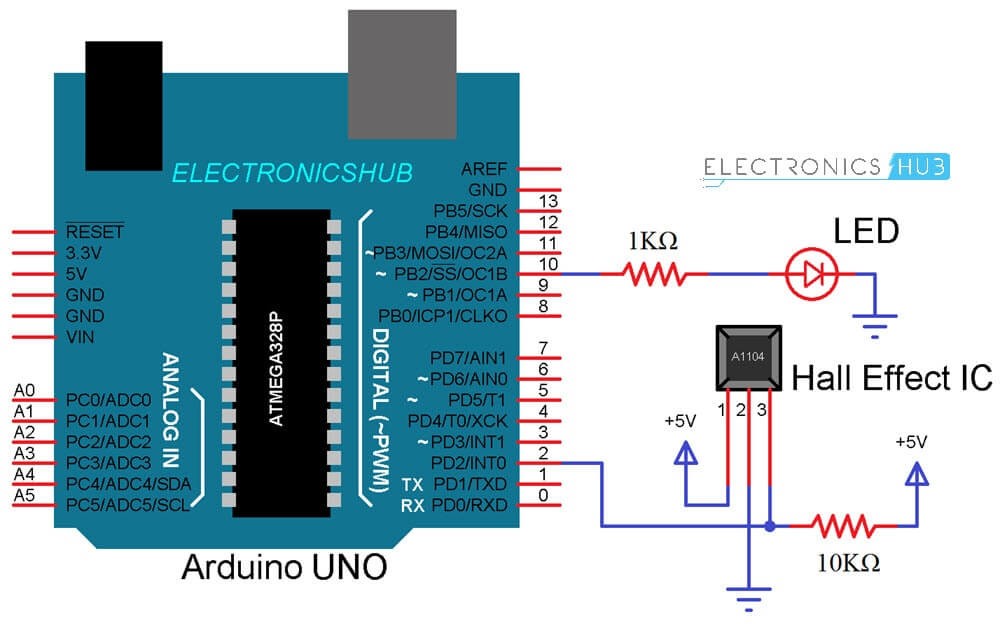
La siguiente imagen muestra el cableado típico de un US1881 a un arduino. La resistencia de 10k actúa como resistencia pull-up para proporcionar una entrada estable al Arduino cuando no se detecta ningún objeto.
El pin de salida del US1881 se puede conectar a cualquier pin digital del Arduino. Si el sensor se usa para medir la velocidad de una rueda, usar un pin que admita interrupciones externas puede ser beneficioso.
En este ejemplo, la salida del sensor Hall está conectada al pin 2 del Arduino Uno.
| const int pin led = 10; const int alfiler = 2; vacío Configure() { pinMode (ledPin, SALIDA); pinMode (hallPin, ENTRADA); } vacío loops() { if(digitalRead (hallPin) == BAJO) { digitalWrite (ledPin, ALTO); } más { digitalWrite (ledPin, BAJO); } } |
Este Arduino monitorea constantemente el estado de la salida del sensor Hall. Cuando se coloca un imán cerca del sensor, emite una señal lógica BAJA.
El Arduino monitorea esto y si la señal es BAJA, enciende el LED. Cuando no hay un imán presente, la salida del sensor de pasillo es lógica ALTA. Al observar esto, el Arduino apaga el LED.
Conclusión
En este artículo, discutimos qué son los sensores de proximidad de efecto Hall, cómo funcionan y sus aplicaciones. Los sensores de efecto Hall son extremadamente útiles en aplicaciones de alta velocidad como la detección de velocidad.
Dependiendo de la aplicación, también puede haber mejores alternativas como sensores de proximidad inductivos, ópticos o capacitivos.

