Un codificador rotatorio es un dispositivo electromecánico que se usa para monitorear objetos giratorios como ejes y ejes. Los codificadores giratorios se pueden utilizar para medir la posición, la distancia y la velocidad angular del eje giratorio.
Hay dos tipos de codificadores rotativos: codificadores rotativos incrementales y codificadores rotativos absolutos. En este artículo, veremos codificadores rotativos absolutos, su principio de funcionamiento y aplicaciones.
¿Qué es un codificador rotatorio absoluto?
Los codificadores rotativos absolutos pertenecen a la familia de codificadores rotativos. Se utilizan para medir los siguientes parámetros de objetos giratorios como ejes o ejes:
- Velocidad angular
- Información de posición
- Distancia

Los codificadores rotativos absolutos se encuentran en aplicaciones donde se requiere la medición precisa de la posición y el desplazamiento angular. Estos sensores también encuentran sus aplicaciones en sistemas donde se debe medir la velocidad de rotación.
Estos sensores emiten una palabra única (una palabra es un conjunto de bits) de acuerdo con la posición actual del sensor.
Esto es diferente de los codificadores rotativos incrementales, ya que los codificadores incrementales están diseñados para generar un flujo continuo de pulsos ubicuos mientras que los codificadores absolutos emiten un conjunto único de bits por cada posición del sensor.
Esto nos permite medir el posición exacta (absoluta) del eje en lugar de calcular el cambio de posición.
Echemos un vistazo en profundidad a cómo funcionan los codificadores rotativos absolutos.
Principio de funcionamiento del codificador rotatorio absoluto
Los codificadores rotativos absolutos, en comparación con los codificadores rotativos incrementales, son algo complejos en su funcionamiento, pero fáciles de usar en una aplicación.
Al igual que los codificadores rotativos incrementales, los codificadores absolutos también tienen un eje giratorio unido al sensor. El eje está conectado a un disco con un juego de ranuras cuidadosamente colocadas. Esta rueda también se conoce como 'rueda codificadora'.
La rueda codificadora tiene un patrón de bits único. A diferencia de los codificadores incrementales donde todas las ranuras se colocan en un patrón repetido, las ranuras de la rueda codificadora del codificador absoluto son diferentes entre sí.
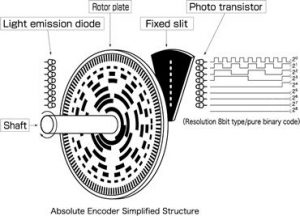
Cuando el eje gira, la rueda codificadora también gira junto con él. Hay un conjunto de LED que emiten haces de luz sobre la rueda codificadora. Cuando los rayos de luz se alinean con las ranuras, los rayos pasan a través de la rueda codificadora, la ranura fija e iluminan los fototransistores.
Hay codificadores absolutos magnéticos que reemplazan la matriz de LED con una matriz de detección magnética y un conjunto de polos magnéticos que reemplazan los marcadores ópticos.
Cada fototransistor funciona de forma independiente y cuando se ilumina, emiten una señal lógica ALTA. Cuando no hay un haz presente en un fototransistor en particular, genera una lógica BAJA.
El número de fototransistores y niveles de ranuras grabados en la rueda codificadora determina la precisión y resolución del codificador rotatorio absoluto.
Esto generalmente se indica en los bits. Por ejemplo, un codificador absoluto de resolución de 8 bits puede proporcionar información de 256 posiciones y puede medir desplazamientos angulares de incrementos de 1.41 grados.
Dependiendo del tipo de codificador absoluto y su construcción, existen múltiples configuraciones de salida disponibles:
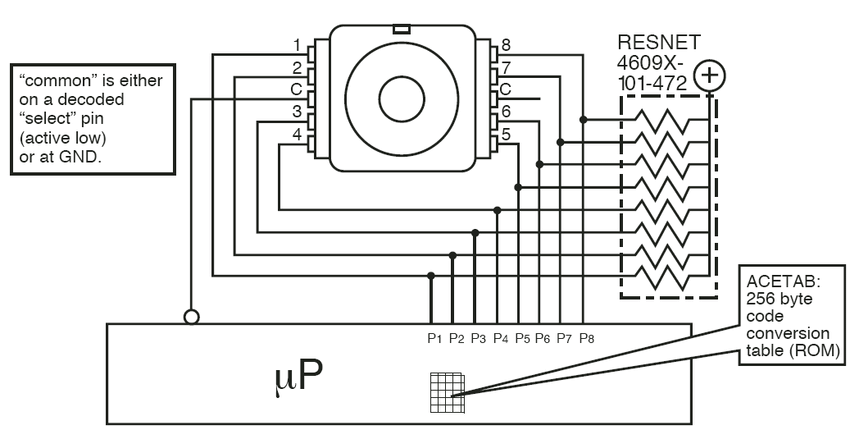
- Salida paralela
- Este tipo de sensor tiene varias líneas de salida que proporcionan la información de posición. Por ejemplo, un sensor de salida en paralelo de 8 bits tiene 8 líneas de señal y dos cables de alimentación. La salida se puede codificar en binario or código gris formato.
- Los sensores de salida en paralelo tienen una cantidad mínima de circuitos integrados, ya que no implican mucho procesamiento.
- Salida serial
- Los codificadores absolutos de salida en serie dan salida a la información de posición y velocidad a través de un protocolo de transmisión de datos sincrónica.
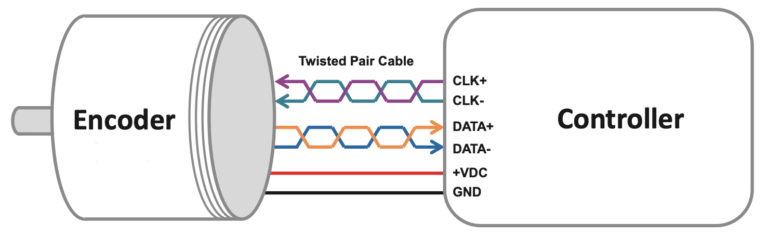
- Los sensores de salida en serie tienen líneas de reloj y datos, y emiten un bit por cada pulso de reloj. Estos sensores también vienen en formatos de salida codificados en gris o binarios.
- Para mayor inmunidad al ruido, los sensores de tipo de salida en serie utilizan la comunicación de par diferencial según Estándar RS-422. Un par por reloj y otro para las líneas de datos.
- Los métodos de comunicación síncrona más populares para codificadores absolutos son SSI: Interfaz serial síncrona, BiSS: Interfaz serial síncrona bidireccional e Hiperface DSL. También hay interfaces propietarias como EnDat2.2.
- Salida analógica
- Los sensores de salida analógica emiten un voltaje o un valor de corriente dependiendo de la posición del sensor.
Ventajas de los codificadores absolutos
Los codificadores absolutos, aunque cuestan un poco más, tienen múltiples ventajas en términos de detección de posición:
- Emite la posición absoluta del eje
- Cuando se 'sondean', los codificadores absolutos emiten una información de posición única relacionada con su posición actual. Esto significa que no hay dos posiciones del eje en una rotación de 360 grados que sean idénticas.
- Varias opciones de salida
- Los codificadores absolutos tienen varios tipos de salida: paralelo, serie (protocolos estándar y patentados)
- Inmune a fallas de energía
- Los codificadores absolutos no sufren cortes de energía. Siempre están listos para proporcionar información de posicionamiento inmediatamente después de un ciclo de energía.
- Alta resolución
- Simplemente aumentando el número de pistas de codificador y unidades de detección, los codificadores absolutos pueden tener una resolución mucho más alta que los codificadores incrementales.
Codificadores incrementales vs absolutos
La principal diferencia entre los codificadores absolutos e incrementales es su funcionamiento. Los codificadores absolutos pueden proporcionar información de posición incluso cuando el eje no está girando.
Los codificadores incrementales solo pueden proporcionar pulsos cuando el eje está girando. Debe llevarse a cabo un recuento de pulsos por separado para determinar la posición relativa y la distancia.
Los codificadores incrementales deben tener un marcador de "referenciado" separado para determinar la posición inicial / de referencia del eje. Sin embargo, los codificadores absolutos no necesitan tal adición y pueden proporcionar una posición inmediata para el inicio del eje.
Esto puede resultar muy útil en aplicaciones en las que no es deseable girar el eje para obtener la posición "inicial".
Los codificadores incrementales requieren módulos decodificadores especiales de alta velocidad para obtener la información de velocidad, posición y distancia. Esto limita la integración con dispositivos electrónicos que no sean PLC y microcontroladores. A veces, la sobrecarga de procesamiento también puede afectar negativamente el rendimiento del sistema.
Los sensores absolutos tienen una resolución general más alta que los sensores incrementales. La resolución de los codificadores incrementales está limitada al tamaño físico del disco y la respuesta de frecuencia del sistema.
Los codificadores absolutos siempre están listos para proporcionar información de posición bajo demanda, mientras que los codificadores incrementales necesitan ser monitoreados constantemente para obtener el tren de pulsos y calcular la velocidad, dirección y distancia actuales. Debido a esto, los codificadores absolutos pueden recuperarse fácilmente de los cortes de energía.
Aplicaciones del codificador absoluto
Los codificadores absolutos se utilizan principalmente en aplicaciones de posicionamiento de alta precisión como,
- Máquinas CNC multiejes (montaje y fabricación)
- Brazos robóticos (robots quirúrgicos, diagnóstico por imágenes)
- Sistema de posicionamiento de ascensores
- Aplicaciones de impresión
- Industria del automovilismo (sistemas de conducción por cable) y muchos más.
Salida del codificador absoluto
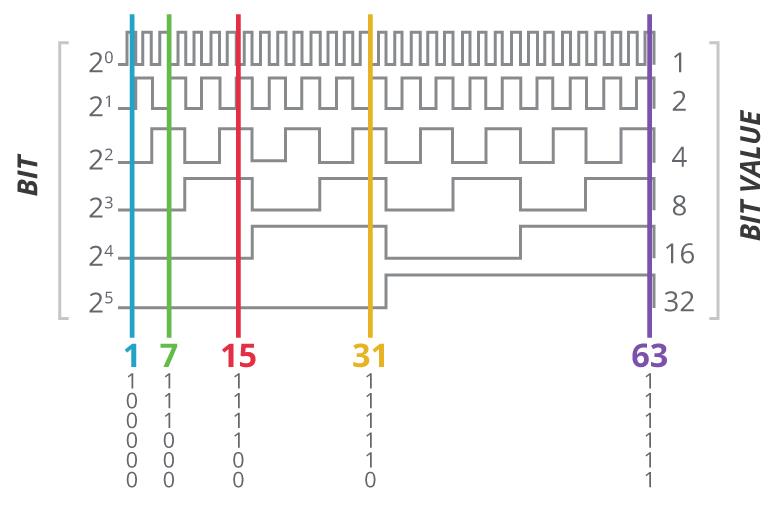
Los codificadores absolutos emiten un conjunto de bits llamados "una palabra" para cada posición del eje. Hay tres tipos de salidas para codificadores absolutos: paralelo, serial y analógico.
Los codificadores de salida en paralelo tienen un número n de cables (n = número de bits (resolución)) que emiten los bits correspondientes de la palabra. La figura que se muestra a continuación muestra una salida de codificador absoluto de palabra de 6 bits. La palabra de salida puede ser de código gris or binario formato.
Los codificadores de salida en serie generan un flujo de datos cuando se "sondean". El sensor tiene incorporado un circuito de procesamiento de señales basado en un microcontrolador. Hay sistemas de bus serie como SSI, BiSS, EnDat, Modbus y Profibus que permiten que un dispositivo compatible se comunique con el sensor.
Los sensores de salida analógica emiten una señal de voltaje o corriente dependiendo de la posición del sensor.
Tipos de codificadores absolutos
Los codificadores absolutos se pueden clasificar según la tecnología de detección como óptico y magnético. Uso de codificadores ópticos luz visible (LED) y una rueda codificadora ranurada.
Uso de codificadores magnéticos polos magnéticos y matriz de detección magnética para obtener la posición actual de la rueda codificadora.
La otra clasificación se basa en el tipo de salida. Hay codificadores absolutos de una y varias vueltas. Los codificadores absolutos de una sola vuelta solo pueden proporcionar información de posicionamiento en un solo giro de 260 grados.
Los codificadores multivuelta proporcionan datos adicionales que proporcionan el número de vueltas de 360 grados que ha girado el eje. Esto ayuda a determinar el número de rotaciones sin tener que contar desde el principio.
Codificadores absolutos de una vuelta frente a codificadores absolutos de varias vueltas
Dependiendo de la disponibilidad de una función especial para contar las revoluciones, existen dos tipos de encoders absolutos: Encoders absolutos monovuelta y multivuelta.
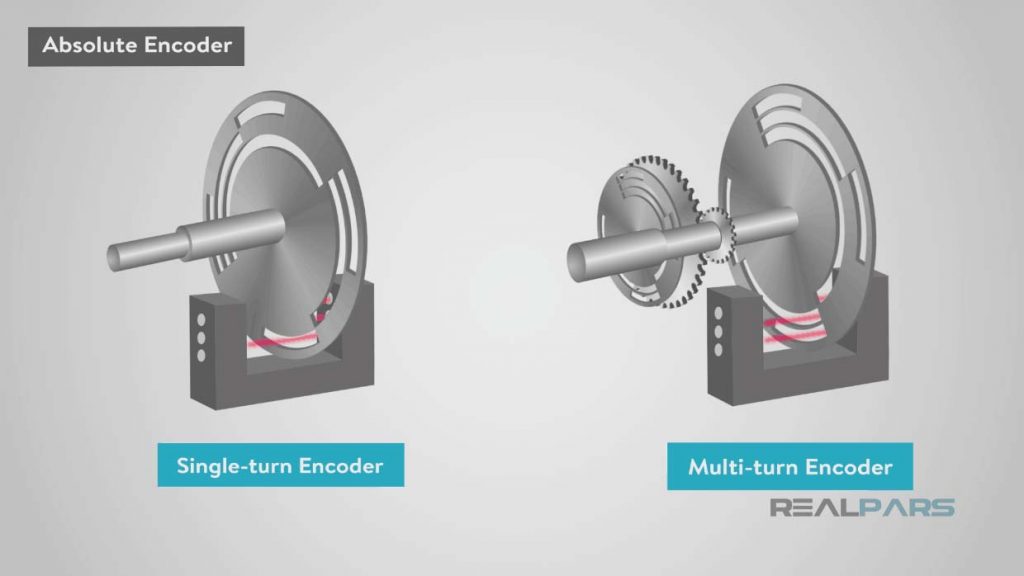
Los codificadores absolutos de una sola vuelta pueden medir la posición dentro de una rotación.
Por ejemplo, si un codificador absoluto de una sola vuelta gira 360 grados desde su posición inicial y alcanza el grado 361 de rotación, el sensor iniciará la salida desde el principio. Indicará la posición como 1 grado.
Estos sensores no pueden contar ni proporcionar una señal especial cuando la rotación excede una revolución completa. Por ejemplo, el Sensores de la serie 845G de Allen Bradley tienen una salida de 12 bits, 0 como mínimo y 4095 es la posición máxima. Una vez que llega a 4096, la salida llega a 0.
Los codificadores absolutos de una vuelta se encuentran en aplicaciones como:
- telescopios
- Antenas giratorias
- Generadores de turbina eólica
- Portones / Puertas
Los codificadores de una vuelta solo carecen de la función de conteo de revoluciones y se pueden utilizar para mediciones de velocidad y posición. Si es necesario, la posición inicial se puede utilizar como referencia y el método de software se puede utilizar para contar el número aproximado de revoluciones.
Los codificadores absolutos multivuelta, por otro lado, también pueden contar las revoluciones. Por ejemplo, un codificador absoluto multivuelta de 12 bits tiene 4096 pasos por revolución y también puede contar 4096 revoluciones. Los codificadores multivuelta utilizan una de las siguientes tecnologías para retener el recuento de revoluciones:
- Tipo de engranajes
- Los codificadores con engranajes utilizan un conjunto de engranajes planetarios para rastrear el número de revoluciones. Estos tipos tienen la desventaja del desgaste mecánico a lo largo del tiempo.
- Tipo de batería de respaldo
- Este tipo utiliza un contador electrónico y una memoria para almacenar la información del contador. Pueden contar revoluciones incluso cuando están apagadas. Sin embargo, en la mayoría de los casos, la batería está incorporada al sensor. Es posible que deba reemplazarlo de vez en cuando, dependiendo de la frecuencia de uso.
- Tipo de sensor Wiegand
- WiegandLos sensores de tipo cable utilizan un cable especial enrollado cerca del eje y utilizan un pulso magnético para activar un cambio de polaridad. Este cambio ocurre después de cada revolución completada. Esta conmutación se utiliza para contar el número de revoluciones.
Los codificadores multivuelta se encuentran en aplicaciones como,
- Articulaciones robóticas
- Grúas
- Servomotores (360 servos)
- Sistemas de control de antena parabólica y muchos más donde un punto de pivote de rotación no es accesible / disponible.
¿Qué es un codificador absoluto magnético?
Los codificadores absolutos magnéticos utilizan polos magnéticos y sensores magnéticos en lugar de LED y fotodiodos que se encuentran en los codificadores ópticos. La siguiente imagen muestra un ejemplo de una rueda codificadora magnética con codificación absoluta.
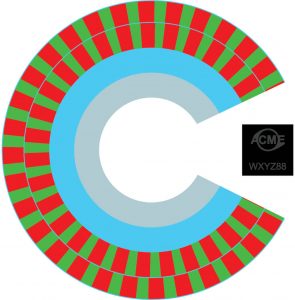
La disposición del polo exterior tiene un polo magnético más que la disposición interior. Esto hace que los pares de polos interior y exterior estén únicamente desplazados.
Los sensores captan señales de un polo por rueda a la vez y calculan su diferencia de fase (cambio de fase). Esta diferencia de fase analógica se convierte luego en un valor digital para su salida.
Los codificadores magnéticos son muy robustos y resistentes a golpes y vibraciones.
Encuentran sus aplicaciones en entornos donde hay partículas contaminantes como polvo, humedad y otras partículas de material que pueden acumularse. Sin embargo, debido a su principio de funcionamiento, los codificadores magnéticos son susceptibles a interrupciones causadas por campos magnéticos fuertes.
Interfaz de un codificador absoluto con Raspberry Pi
Si bien conectar un codificador absoluto con una Raspberry Pi puede ser simple, el programa para leer correctamente las entradas puede volverse un poco complicado según el tipo de sensor. Echemos un vistazo a cómo conectar un codificador absoluto de tipo de salida en serie (EMS22A) con una Raspberry Pi.
Cableado del sensor
El sensor tiene el siguiente formato de cableado:
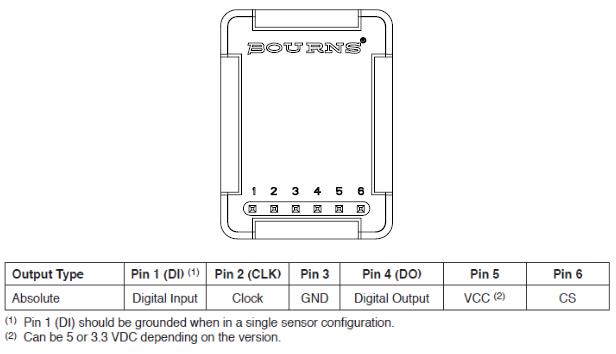
Conecte los cables del sensor de la siguiente manera con la Raspberry Pi:
- Pin 2 (CLK) -> RPi pin 2
- Pin 4 (DO) -> RPi pin 3 (si usa más de un sensor, conecte el pin de datos del segundo sensor al pin 14)
- Pin 6 (CS) -> RPi pin 4
- VCC -> Pin RPi + 5V
- GND -> clavija RPi GND
Código de ejemplo
Para sondear la información del sensor, el siguiente código de muestra escrito por hareshkarnan puede ser usado. Imprimirá las lecturas del sensor adjunto cuando se ejecute.
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
PIN_CLK = 2
PIN_DAT = [3,14]
PIN_CS = 4
delay = 0.0000005
ns = 2 # number of sensors attached
# totally 10 bits to be extracted from SSI signal
bitcount = 16
# pin setup done here
try:
GPIO.setup(PIN_CLK,GPIO.OUT)
GPIO.setup(PIN_DAT[:],GPIO.IN)
GPIO.setup(PIN_CS,GPIO.OUT)
GPIO.output(PIN_CS,1)
GPIO.output(PIN_CLK,1)
except:
print "ERROR. Unable to setup the configuration requested"
#wait some time to start
time.sleep(0.5)
print "GPIO configuration enabled"
def clockup():
GPIO.output(PIN_CLK,1)
def clockdown():
GPIO.output(PIN_CLK,0)
def MSB():
# Most Significant Bit
clockdown()
def readpos():
GPIO.output(PIN_CS,0)
time.sleep(delay*2)
MSB()
data = [0]*ns
for i in range(0,bitcount):
if i<10:
#print i
clockup()
for j in range(0,ns):
data[j]<<=1
data[j]|=GPIO.input(PIN_DAT[j])
clockdown()
else:
for k in range(0,6):
clockup()
clockdown()
GPIO.output(PIN_CS,1)
return data
try:
while(1):
print readpos()
time.sleep(0.001)
#break
finally:
print "cleaning up GPIO"
GPIO.cleanup()
Precio del codificador absoluto
Los precios de los codificadores rotativos absolutos varían de $ 10-15 a más de $ 1000. Esto se debe principalmente a las funciones disponibles, la resolución, el tipo de salida y el protocolo que se utiliza. Los sensores patentados de alta resolución tienden a costar más que los sensores simples de tipo de salida paralela que se pueden comprar a un costo menor.
Conclusión
Los codificadores rotativos se utilizan para realizar un seguimiento de los componentes mecánicos giratorios como ejes y varillas. Los codificadores absolutos y los codificadores incrementales son los dos tipos de codificadores rotativos.
Hay dispositivos de interfaz de codificador especiales que pueden leer la entrada sin procesar de un codificador rotatorio y enviar la información de velocidad, posición y distancia a una computadora.
Los codificadores compatibles también se pueden conectar directamente a PLC y otras computadoras para obtener los valores brutos y realizar cálculos dentro del software.

