Einleitung
Industrielle Automatisierungsanwendungen erfordern häufig die Erkennung von Objekten. Es gibt viele Arten von Sensoren, die das Vorhandensein von Objekten aus fast jedem Material erkennen.
Hall-Effekt-Sensoren wurden speziell entwickelt, um magnetische Objekte zu erkennen. Sie werden häufig in Anwendungen zur Geschwindigkeits-/Positionsmessung verwendet.
Was ist ein Hall-Effekt-Näherungssensor?
Hall-Effekt-Sensoren gehören zur Familie von Annäherungssensoren. Sie erkennen die Anwesenheit anhand der Stärke des von einem Objekt erzeugten Magnetfelds. Das Prinzip von Hall-Effekt wird verwendet, um das Vorhandensein und die Intensität eines Magnetfelds zu erkennen.

Hall-Effekt-Sensoren können jedes magnetische Objekt erkennen, das die richtige Polarität und ausreichende Stärke hat. Dazu gehören Elektromagnete und Permanentmagnete wie Neodym Magnete.
Hallsensoren werden in Positions-, Näherungs- und Geschwindigkeitserfassungsanwendungen verwendet. Moderne Automobile verwenden beispielsweise Hall-Effekt-Sensoren, um die Fahrzeuggeschwindigkeit, die Motorkurbelwellenposition und die Drehzahl zu berechnen.
Eines der beliebtesten Systeme, die Hall-Effekt-Sensoren verwenden, ist das Antiblockierbremse (ABS) Systeme in Fahrzeugen. In Automatisierungsanwendungen finden Hallsensoren ihren Einsatz in Motorsteuerung und sogar Gleichstromerfassung.
Wie funktioniert ein Hall-Effekt-Näherungssensor?
Hall-Effekt-Sensoren bestehen hauptsächlich aus einem dünnen Stück rechteckigen Halbleiters. Der Halbleiter besteht oft aus Galliumarsenid (GaAs), Indiumarsenid (InAs) oder Indiumantimonid (InSb).
Durch diesen Leiter darf jederzeit ein Dauerstrom fließen. Wird ein Magnet in die Nähe dieses dünnen Halbleiters gebracht, unterbricht er den Stromfluss, indem er die Ladungsträger im Halbleiter ablenkt.
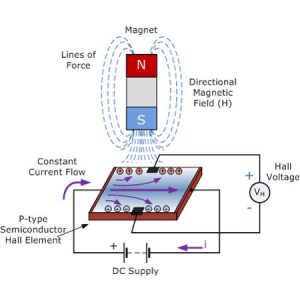
Dieses Phänomen verursacht den Aufbau einer Spannungsdifferenz senkrecht zum Stromfluss und über den Halbleiter. Dies ist im obigen Bild als positive und negative Ladungen dargestellt.
Diese Spannung heißt Hallspannung, benannt nach dem Physiker Edwin Herbert Halle der es entdeckt hat. Um eine messbare Spannungsdifferenz zu erzeugen, muss der Magnet:
- Magnetische Flusslinien sollten senkrecht sein
- Der Pol zum Sensor sollte die richtige Polarität haben. Das ist oft der Südpol des Magneten.
Ein typischer Hall-Effekt-Sensor hat das folgende Blockschaltbild, das die Funktionalität seiner Schaltung darstellt.
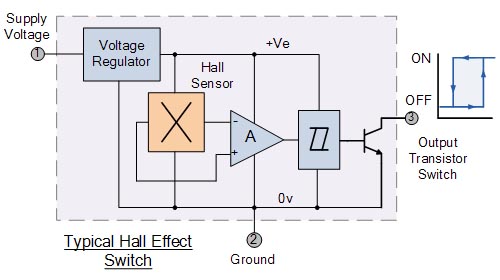
Der Spannungsregler liefert eine gleichmäßige, stabile Spannung für den Sensor, den Verstärker und andere Komponenten.
Wenn ein magnetischer Gegenstand in der Nähe des Sensors platziert wird, erhöht sich die Hall-Spannung. Der Verstärker verstärkt diese Differenz, um den Schmitt-Trigger zu speisen, um einen sauberen, jitterfreien Ausgang zu liefern.
Wenn das verstärkte Signal einen bestimmten Schwellenwert überschreitet, wird der Schmitt-Trigger aktiviert. Das Signal vom Schmitt-Trigger aktiviert den Transistor.
Der Transistor arbeitet als Ausgangsschaltgerät, das den Ausgang ein- oder ausschaltet. Die Komponente der Endstufe hängt vom Ausgangstyp des Sensors ab.
Es kann ein Transistor (NPN/PNP), ein Relais oder auch das rohe, analoge Signal sein, das die Stärke des Magnetfelds darstellt.
Welche Arten von Hall-Effekt-Sensoren gibt es?
Hall-Effekt-Sensoren können auf verschiedene Weise kategorisiert werden.
- Bipolare und unipolare Hall-Effekt-Sensoren
- Bipolare Sensoren werden auch als „rastende“ Typen bezeichnet. Ihre Ausgänge werden aktiviert, wenn ein positives Magnetfeld (Südpol) vorhanden ist. Zum Ausschalten/Freigeben des Ausgangs sollte ein negatives Feld (Nordpol) angelegt werden.
- Unipolare Sensoren schalten den Ausgang ein, wenn ein magnetischer Südpol vorhanden ist, und schalten seinen Ausgang aus, wenn der Magnet entfernt wird.
- Digitale und analoge Ausgänge
- Sensoren mit digitalem Ausgang geben einen unterschiedlichen logischen HIGH- oder LOW-Ausgang aus, während analoge Sensoren einen Wertebereich wie 0-5 V oder 4-20 mA ausgeben.
Welche Reichweite hat ein Hall-Effekt-Sensor?
Hallsensoren haben einen typischen Arbeitsbereich von ca 0-40mm. Dies hängt jedoch auch direkt von der magnetischen Flussdichte des Objekts ab.
Stärkere Magnete haben mehr Einfluss und können den Sensor bei relativ größerer Entfernung auslösen. Schwächere Magnete sollten sehr nahe am Sensor platziert werden, um ihn auszulösen.
Was ist der Unterschied zwischen einem Hallsensor und einem induktiven Sensor?
Der Hauptunterschied zwischen diesen beiden Sensoren besteht in der Art und Weise, wie sie Objekte erkennen. Induktive Näherungssensoren erzeugen ein eigenes Magnetfeld und überwachen die Feldänderung, um Objekte zu erkennen.
Das bedeutet, dass der Sensor die Veränderung des eigenen Magnetfeldes durch externe Objekte.
Hall-Effekt-Sensoren überwachen externe Magnetfelder. Sie erfordern, dass das zu erkennende Objekt ein eigenes Magnetfeld erzeugt. Daher können Hall-Effekt-Sensoren nur Permanentmagnete und Elektromagnete erkennen.
Induktive Näherungssensoren können viele Arten von Metallen wie Eisen, Kupfer und Aluminium erkennen.
Hall-Effekt-Näherungssensoren sind anfällig für magnetische Störungen. Induktive Näherungssensoren sind gegenüber diesen Störungen relativ tolerant. Die Leistung beider Sensoren kann jedoch durch extreme Temperaturen und Chipaufbau beeinträchtigt werden.
Unter Berücksichtigung des Installationsaufwands sind induktive Sensoren relativ einfacher zu installieren, da sie einen Teil der Maschine als Erfassungsobjekt (dh Grenzerfassung) verwenden können.
Hall-Sensoren erfordern eine spezielle magnetische Befestigung an der Maschine außer dem Sensor selbst (zB Raddrehzahlerfassung).
So verwenden Sie einen Hall-Effekt-Sensor mit Arduino
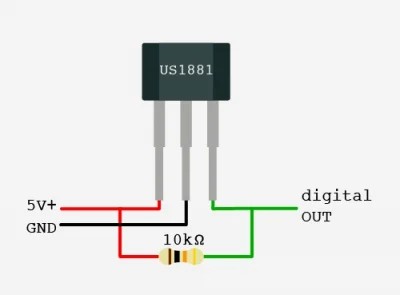
Ähnlich wie bei industriellen Näherungssensoren gibt es von ihnen Miniaturversionen auf dem Markt. Die US5881/US1881 sind einige der beliebtesten Hall-Effekt-Sensoren, die 5V-kompatibel sind.
Dies bedeutet, dass wir sie leicht in einen Arduino integrieren können, um magnetische Objekte zu erfassen.
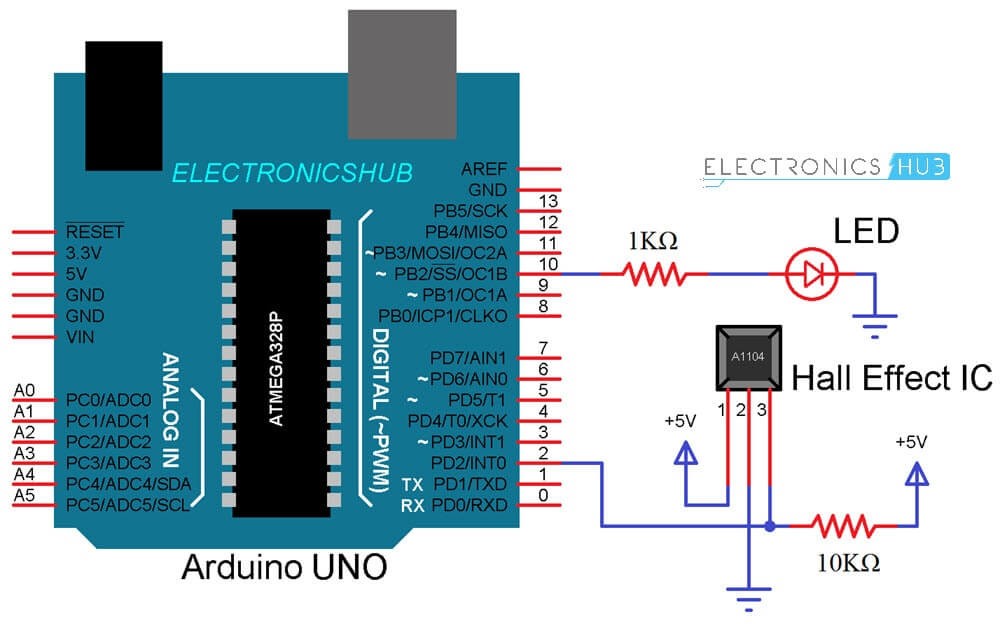
Das Bild unten zeigt die typische Verkabelung eines US1881 mit einem Arduino. Der 10k-Widerstand wirkt als a Pull-Up-Widerstand um dem Arduino einen stabilen Eingang zu geben, wenn kein Objekt erkannt wird.
Der Ausgangspin des US1881 kann mit jedem digitalen Pin des Arduino verbunden werden. Wenn der Sensor verwendet wird, um die Geschwindigkeit eines Rades zu messen, kann die Verwendung eines Pins, der externe Interrupts unterstützt, von Vorteil sein.
In diesem Beispiel ist der Ausgang des Hallsensors mit Pin 2 des Arduino Uno verbunden.
| const int LedPin = 10; const int hallPin = 2; ungültig Setup() { pinMode (ledPin, AUSGANG); pinMode (hallPin, EINGANG); } ungültig Schleife() { if(digitalRead (hallPin) == NIEDRIG) { digitalWrite (ledPin, HIGH); } sonst { digitalWrite (ledPin, LOW); } } |
Dieser Arduino überwacht ständig den Zustand des Ausgangs des Hall-Sensors. Wenn ein Magnet in der Nähe des Sensors platziert wird, gibt er ein logisches LOW-Signal aus.
Das Arduino überwacht dies und wenn das Signal LOW ist, schaltet es die LED ein. Wenn kein Magnet vorhanden ist, ist der Ausgang des Hallsensors logisch HIGH. Wenn man dies beobachtet, schaltet der Arduino die LED aus.
Zusammenfassung
In diesem Artikel haben wir diskutiert, was Hall-Effekt-Näherungssensoren sind, wie sie funktionieren und welche Anwendungen sie haben. Hall-Effekt-Sensoren sind in Hochgeschwindigkeitsanwendungen wie der Geschwindigkeitserfassung äußerst nützlich.
Je nach Anwendung gibt es auch bessere Alternativen wie induktive, optische oder kapazitive Näherungssensoren.

