Ein Drehgeber ist ein elektromechanisches Gerät zur Überwachung rotierender Objekte wie Wellen und Achsen. Mit Drehgebern können Position, Abstand und Winkelgeschwindigkeit der rotierenden Welle gemessen werden.
Es gibt zwei Arten von Drehgebern: inkrementale Drehgeber machen absolute Drehgeber. In diesem Artikel schauen wir uns an absolute Drehgeber, ihr Funktionsprinzip und ihre Anwendungen.
Was ist ein absoluter Drehgeber?
Absolute Drehgeber gehören zur Familie der Drehgeber. Sie werden verwendet, um folgende Parameter von rotierenden Objekten wie Wellen oder Achsen zu messen:
- Winkelgeschwindigkeit
- Positionsinformationen
- Entfernung

Absolute Drehgeber finden sich in Anwendungen, bei denen eine genaue Messung von Position und Winkelversatz erforderlich ist. Diese Sensoren finden auch ihre Anwendung in Systemen, in denen Drehzahlen gemessen werden sollen.
Diese Sensoren geben ein eindeutiges Wort aus (ein Wort ist a Bitsatz) laut aktuelle Position des Sensors.
Dies unterscheidet sich von inkrementalen Drehgebern, da Inkrementalgeber dafür ausgelegt sind, a . auszugeben kontinuierlicher Strom allgegenwärtiger Impulse während absolute Encoder a . ausgeben einzigartiger Bitsatz für jede Position des Sensors.
Damit können wir die genaue (absolute) Position der Welle, anstatt die Positionswechsel.
Lassen Sie uns einen detaillierten Blick auf die Funktionsweise von absoluten Drehgebern werfen.
Funktionsprinzip des absoluten Drehgebers
Absolute Drehgeber sind im Vergleich zu inkrementalen Drehgebern etwas komplex im Betrieb, aber einfach in einer Anwendung zu verwenden.
Wie bei den inkrementalen Drehgebern ist auch bei den Absolutwertgebern eine rotierende Welle am Sensor befestigt. Die Welle ist mit einem sorgfältig platzierten Satz von Schlitzen mit einer Scheibe verbunden. Dieses Rad wird auch als „Coderad“ bezeichnet.
Das Coderad hat ein einzigartiges Bitmuster. Im Gegensatz zu Inkremental-Encodern, bei denen alle Slots in einem sich wiederholenden Muster platziert sind, unterscheiden sich die Slots des Absolut-Encoder-Coderads voneinander.
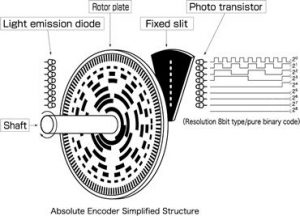
Wenn sich die Welle dreht, dreht sich auch das Coderad mit. Es gibt eine Reihe von LEDs, die Lichtstrahlen auf das Coderad emittieren. Wenn die Lichtstrahlen mit den Schlitzen ausgerichtet sind, passieren die Strahlen das Coderad, den festen Schlitz und beleuchten die Fototransistoren.
Es gibt magnetische Absolut-Encoder, die das LED-Array durch ein magnetisches Sensorarray ersetzen, und einen Satz magnetischer Pole, die die optischen Marker ersetzen.
Jeder Fototransistor arbeitet unabhängig und gibt bei Beleuchtung ein logisches HIGH-Signal aus. Wenn an einem bestimmten Fototransistor kein Strahl vorhanden ist, gibt er logisch LOW aus.
Die Anzahl der Fototransistoren und die Ebenen der im Coderad eingravierten Schlitze bestimmen die Genauigkeit und Auflösung des absoluten Drehgebers.
Dies wird normalerweise in . angegeben Bits. Zum Beispiel kann ein Absolut-Encoder mit 8-Bit-Auflösung 256 Positionsinformationen liefern und Winkelverschiebungen von 1.41-Grad-Inkrementen messen.
Abhängig vom Typ des Absolutwertgebers und seiner Konstruktion stehen mehrere Ausgangskonfigurationen zur Verfügung:
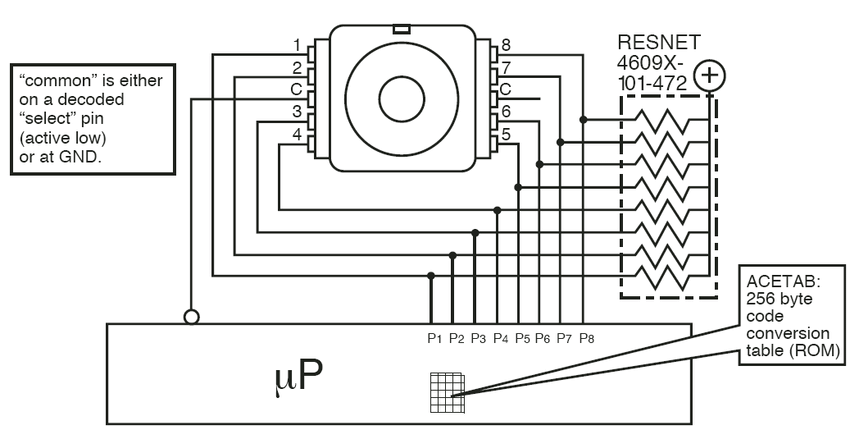
- Parallele Ausgabe
- Dieser Sensortyp hat mehrere Ausgangsleitungen, die die Positionsinformationen bereitstellen. Ein 8-Bit-Sensor mit parallelem Ausgang hat beispielsweise 8 Signalleitungen und zwei Stromversorgungsdrähte. Die Ausgabe kann codiert werden in binär or grauer Code Format.
- Sensoren mit parallelem Ausgang haben eine sehr minimale Menge an eingebauten Schaltungen, da sie nicht viel Verarbeitung erfordern.
- Serieller Ausgang
- Absolute Encoder mit seriellem Ausgang geben die Positions- und Geschwindigkeitsinformationen über ein synchrones Datenübertragungsprotokoll aus.
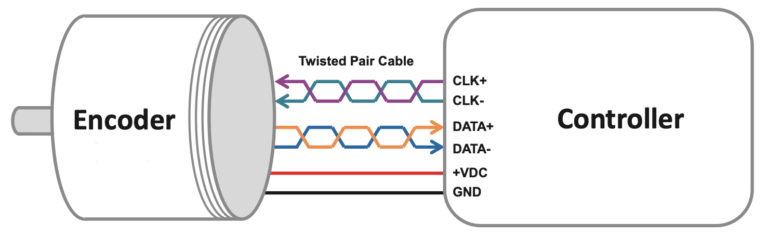
- Sensoren mit seriellem Ausgang haben Daten- und Taktleitungen und geben pro Taktimpuls ein Bit aus. Diese Sensoren sind auch in binären oder graucodierten Ausgabeformaten erhältlich.
- Für zusätzliche Störfestigkeit verwenden Sensoren mit seriellem Ausgang eine differentielle Paarkommunikation gemäß RS-422-Standard. Ein Paar pro Takt und ein weiteres für die Datenleitungen.
- Die beliebtesten synchronen Kommunikationsverfahren für Absolutwertgeber sind SSI: Synchrone Serielle Schnittstelle, BiSS: Bidirektionale Synchrone Serielle Schnittstelle und Hiperface DSL. Es gibt auch proprietäre Schnittstellen wie EnDat2.2.
- Analogausgang
- Analogausgangssensoren geben je nach Position des Sensors einen Spannungs- oder einen Stromwert aus.
Vorteile von Absolutwertgebern
Absolute Drehgeber haben, obwohl sie etwas teurer sind, mehrere Vorteile in Bezug auf die Positionserfassung:
- Gibt die absolute Position der Welle aus
- Beim „Polling“ geben Absolut-Encoder eine eindeutige Positionsinformation in Bezug auf ihre aktuelle Position aus. Dies bedeutet, dass keine zwei Positionen der Welle bei einer 360-Grad-Drehung identisch sind.
- Mehrere Ausgabeoptionen
- Absolute Drehgeber haben mehrere Ausgangstypen: parallel, seriell (Standard- und proprietäre Protokolle)
- Immun gegen Stromausfälle
- Absolute Drehgeber leiden nicht unter Stromausfällen. Sie sind immer bereit, Positionsinformationen direkt nach einem Stromzyklus bereitzustellen.
- Hohe Auflösung
- Durch einfaches Erhöhen der Anzahl der Encoderspuren und Sensoreinheiten können absolute Encoder eine viel höhere Auflösung als inkrementale Encoder haben.
Inkrementelle vs. Absolut-Encoder
Der Hauptunterschied zwischen Absolut- und Inkrementalgebern liegt in der Bedienung. Absolute Encoder können Positionsinformationen liefern, auch wenn sich die Welle nicht dreht.
Inkrementalgeber können nur bei rotierender Welle Impulse liefern. Zur Ermittlung der relativen Position und Distanz sollte eine separate Impulszählung durchgeführt werden.
Inkremental-Encoder müssen über einen separaten „Homing“-Marker verfügen, um die Anfangs-/Referenzposition der Welle zu bestimmen. Absolut-Encoder benötigen jedoch keinen solchen Zusatz und können eine sofortige Position zum Referenzieren der Welle bereitstellen.
Dies kann bei Anwendungen sehr nützlich sein, bei denen das Drehen der Welle zum Erreichen der "Ausgangsposition" unerwünscht ist.
Inkremental-Encoder benötigen spezielle Hochgeschwindigkeits-Decoder-Module, um die Geschwindigkeits-, Positions- und Entfernungsinformationen zu erhalten. Dies schränkt die Integration mit anderen elektronischen Geräten als SPS und Mikrocontrollern ein. Manchmal kann sich auch der Verarbeitungsaufwand negativ auf die Leistung des Systems auswirken.
Absolute Sensoren haben eine höhere Gesamtauflösung als inkrementelle Gegenstücke. Die Auflösung von Inkrementalgebern ist auf die physikalische Größe der Scheibe und den Frequenzgang des Systems beschränkt.
Absolut-Encoder sind immer bereit, Positionsinformationen auf Abruf bereitzustellen, während Inkremental-Encoder ständig überwacht werden müssen, um die Impulsfolge zu erhalten und die aktuelle Geschwindigkeit, Richtung und Entfernung zu berechnen. Dadurch können Absolutwertgeber problemlos nach Stromausfällen wiederhergestellt werden.
Absolut-Encoder-Anwendungen
Absolute Drehgeber werden hauptsächlich in hochpräzisen Positionierungsanwendungen eingesetzt, wie z.
- Mehrachsige CNC-Maschinen (Montage und Fertigung)
- Roboterarme (OP-Roboter, diagnostische Bildgebung)
- Positionierungssystem von Aufzügen
- Druckanwendungen
- Motorsportindustrie (Steer-by-Wire-Systeme) und viele mehr.
Absolut-Encoder-Ausgang
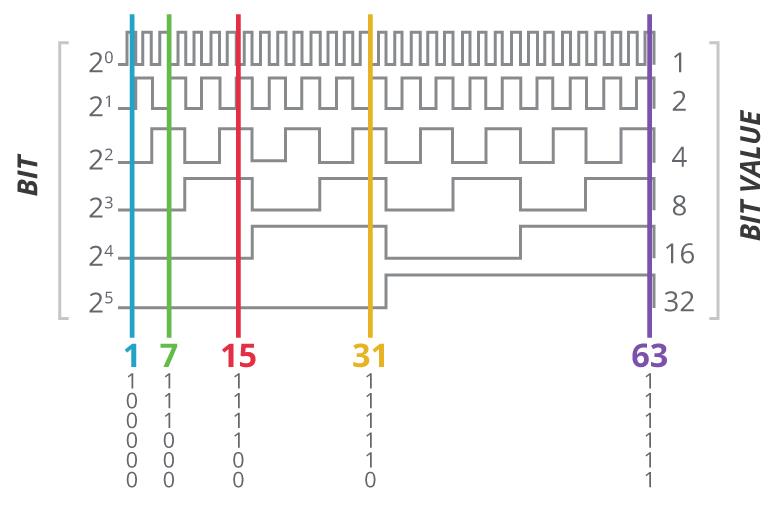
Absolute Encoder geben für jede Position der Welle eine Reihe von Bits aus, die als „Wort“ bezeichnet werden. Es gibt drei Arten von Ausgängen für Absolutwertgeber: parallel, seriell und analog.
Encoder mit parallelem Ausgang haben eine Anzahl von n Drähten (n = Anzahl von Bits (Auflösung)), die die entsprechenden Bits des Wortes ausgeben. Die nachfolgende Abbildung zeigt einen 6-Bit-Wort-Absolutwertgeberausgang. Das Ausgangswort kann sein von Graucode or binär Format.
Serielle Ausgabe-Encoder geben einen Datenstrom aus, wenn sie „abgefragt“ werden. Der Sensor verfügt über eine integrierte Mikrocontroller-basierte Signalverarbeitungsschaltung. Es gibt serielle Bussysteme wie SSI, BiSS, EnDat, Modbus und Profibus, die es einem unterstützten Gerät ermöglichen, mit dem Sensor zu kommunizieren.
Analogausgangssensoren geben je nach Position des Sensors ein Spannungs- oder Stromsignal aus.
Arten von Absolutwertgebern
Absolute Drehgeber können basierend auf der Sensortechnologie kategorisiert werden als optisch machen magnetisch. Optische Encoder verwenden sichtbares Licht (LEDs) und ein geschlitztes Coderad.
Verwendung von magnetischen Encodern Magnetpole und einem Magnetsensor-Array um die aktuelle Position des Coderads abzurufen.
Die andere Klassifizierung basiert auf der Ausgabeart. Es gibt Singleturn- und Multiturn-Absolutwertgeber. Singleturn-Absolutwertgeber können nur Positionsinformationen in einer einzigen 260-Grad-Drehung liefern.
Multiturn-Encoder liefern zusätzliche Daten, die die Anzahl der 360-Grad-Umdrehungen der Welle angeben. Dies hilft, die Anzahl der Umdrehungen zu bestimmen, ohne von Anfang an zählen zu müssen.
Single-Turn- vs. Multi-Turn-Absolut-Encoder
Je nach Verfügbarkeit einer speziellen Funktion zum Zählen der Umdrehungen gibt es zwei Arten von Absolutwertgebern: Singleturn- und Multiturn-Absolutwertgeber.
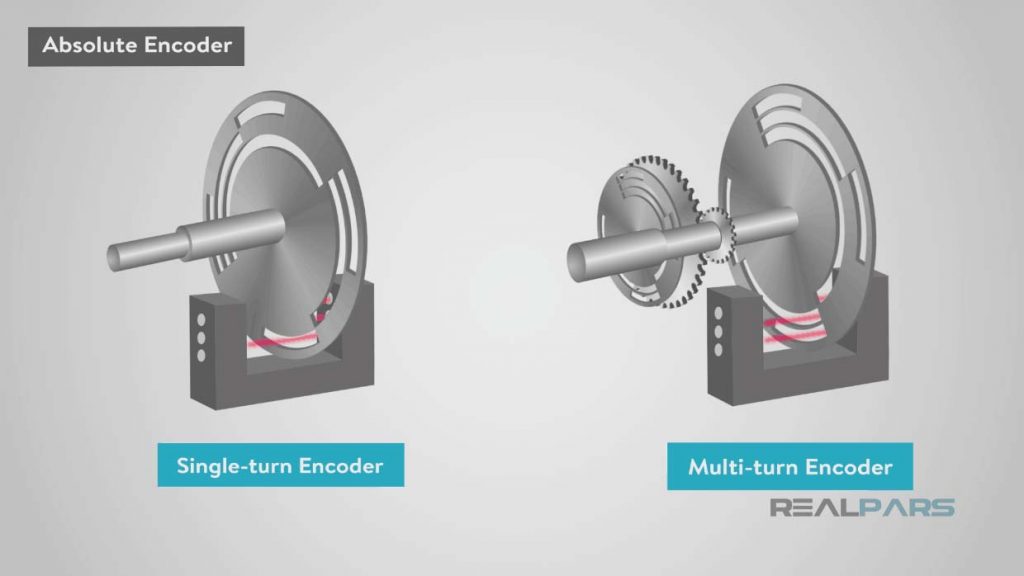
Singleturn-Absolutwertgeber können die Position innerhalb einer Umdrehung messen.
Wenn sich beispielsweise ein Singleturn-Absolutwertgeber um 360 Grad aus seiner Ausgangsposition dreht und den 361. Drehgrad erreicht, beginnt der Sensor mit der Ausgabe von vorne. Es zeigt die Position als 1 Grad an.
Diese Sensoren können nicht zählen oder ein spezielles Signal liefern, wenn die Umdrehung eine volle Umdrehung überschreitet. Zum Beispiel die Sensoren der Serie 845G von Allen Bradley haben eine 12-Bit-Ausgabe, 0 als Minimum und 4095 als maximale Position. Sobald es 4096 erreicht, erreicht die Ausgabe 0.
Singleturn-Absolutwertgeber finden sich in Anwendungen wie:
- Teleskope
- Rotierende Antennen
- Generatoren für Windkraftanlagen
- Tore/Türen
Singleturn-Encodern fehlt lediglich die Funktion zum Zählen von Umdrehungen und sie können für Geschwindigkeits- und Positionsmessungen verwendet werden. Bei Bedarf kann die Ausgangsposition als Referenz verwendet werden und die Softwaremethode kann verwendet werden, um die ungefähre Anzahl der Umdrehungen zu zählen.
Multiturn-Absolutwertgeber hingegen können die Umdrehungen ebenfalls zählen. Ein 12-Bit-Multiturn-Absolutwertgeber hat beispielsweise 4096 Schritte pro Umdrehung und kann auch 4096 Umdrehungen zählen. Multiturn-Encoder verwenden eine der folgenden Technologien, um die Umdrehungszahl beizubehalten:
- Getriebetyp
- Getriebe-Encoder verwenden einen Satz Planetengetriebe, um die Anzahl der Umdrehungen zu verfolgen. Diese Typen haben den Nachteil des mechanischen Verschleißes im Laufe der Zeit.
- Batterie-Backup-Typ
- Dieser Typ verwendet einen elektronischen Zähler und einen Speicher zum Speichern der Zählerinformationen. Sie können auch im ausgeschalteten Zustand Umdrehungen zählen. In den meisten Fällen ist die Batterie jedoch im Sensor integriert. Je nach Nutzungshäufigkeit kann ein Austausch von Zeit zu Zeit erforderlich sein.
- Wiegand-Sensortyp
- Wiegand-Draht-Sensoren verwenden einen speziellen Draht, der in der Nähe der Welle gewickelt ist und einen magnetischen Impuls verwendet, um einen Polaritätswechsel auszulösen. Diese Änderung erfolgt nach jeder vollendeten Umdrehung. Diese Umschaltung wird verwendet, um die Anzahl der Umdrehungen zu zählen.
Multiturn-Encoder finden sich in Anwendungen wie,
- Robotergelenke
- Cranes
- Servomotoren (360 Servos)
- Satellitenschüssel-Steuerungssysteme und viele mehr, bei denen ein Drehpunkt nicht zugänglich/verfügbar ist.
Was ist ein magnetischer Absolutwertgeber?
Magnetische Absolut-Encoder verwenden Magnetpole und magnetische Sensoren anstelle von LEDs und Fotodioden, die in optischen Encodern zu finden sind. Das Bild unten zeigt ein Beispiel für ein absolut codiertes magnetisches Encoderrad.
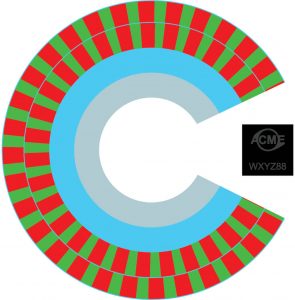
Die äußere Polanordnung weist einen Magnetpol mehr auf als die innere Anordnung. Dadurch werden die inneren und äußeren Polpaare eindeutig versetzt.
Die Sensoren nehmen Signale von jeweils einem Pol pro Rad auf und berechnen ihre Phasendifferenz (Phasenverschiebung). Diese analoge Phasendifferenz wird dann in einen auszugebenden digitalen Wert umgewandelt.
Magnetische Drehgeber sind sehr robust und resistent gegen Schock und Vibration.
Sie finden ihre Anwendung in Umgebungen, in denen sich partikuläre Schadstoffe wie Staub, Feuchtigkeit und andere Materialpartikel ansammeln können. Magnetische Drehgeber sind jedoch aufgrund ihres Funktionsprinzips anfällig für Störungen durch starke Magnetfelder.
Anbindung eines Absolutwertgebers an Raspberry Pi
Während die Verbindung eines Absolutwertgebers mit einem Raspberry Pi einfach sein kann, kann das Programm zum korrekten Auslesen der Eingänge je nach Sensortyp etwas kompliziert werden. Sehen wir uns an, wie ein Absolutwertgeber mit seriellem Ausgang angeschlossen wird (EMS22A) mit einem Raspberry Pi.
Verkabelung des Sensors
Der Sensor hat folgendes Verdrahtungsformat:
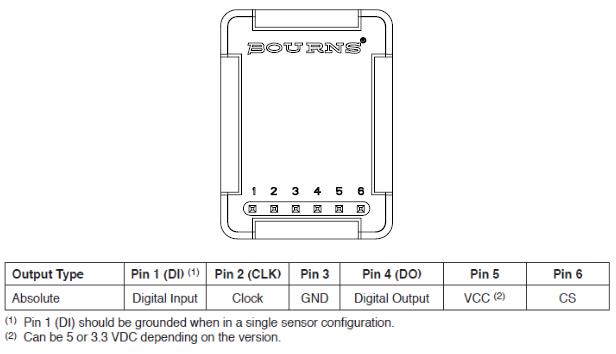
Verbinden Sie die Drähte des Sensors wie folgt mit dem Raspberry Pi:
- Pin 2 (CLK) -> RPi-Pin 2
- Pin 4 (DO) -> RPi Pin 3 (bei Verwendung von mehr als einem Sensor den Datenpin des zweiten Sensors mit Pin 14 verbinden)
- Pin 6 (CS) -> RPi-Pin 4
- VCC -> RPi +5V-Pin
- GND -> RPi GND-Pin
Beispielcode
Um die Informationen vom Sensor abzurufen, wird der folgende Beispielcode geschrieben von Haresh Karnan kann verwendet werden. Es druckt die Messwerte des angeschlossenen Sensors, wenn es ausgeführt wird.
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
PIN_CLK = 2
PIN_DAT = [3,14]
PIN_CS = 4
delay = 0.0000005
ns = 2 # number of sensors attached
# totally 10 bits to be extracted from SSI signal
bitcount = 16
# pin setup done here
try:
GPIO.setup(PIN_CLK,GPIO.OUT)
GPIO.setup(PIN_DAT[:],GPIO.IN)
GPIO.setup(PIN_CS,GPIO.OUT)
GPIO.output(PIN_CS,1)
GPIO.output(PIN_CLK,1)
except:
print "ERROR. Unable to setup the configuration requested"
#wait some time to start
time.sleep(0.5)
print "GPIO configuration enabled"
def clockup():
GPIO.output(PIN_CLK,1)
def clockdown():
GPIO.output(PIN_CLK,0)
def MSB():
# Most Significant Bit
clockdown()
def readpos():
GPIO.output(PIN_CS,0)
time.sleep(delay*2)
MSB()
data = [0]*ns
for i in range(0,bitcount):
if i<10:
#print i
clockup()
for j in range(0,ns):
data[j]<<=1
data[j]|=GPIO.input(PIN_DAT[j])
clockdown()
else:
for k in range(0,6):
clockup()
clockdown()
GPIO.output(PIN_CS,1)
return data
try:
while(1):
print readpos()
time.sleep(0.001)
#break
finally:
print "cleaning up GPIO"
GPIO.cleanup()
Absolutwertgeber-Preis
Die Preise für absolute Drehgeber variieren zwischen 10-15 USD und über 1000 USD. Dies liegt hauptsächlich an den verfügbaren Funktionen, der Auflösung, dem Ausgabetyp und dem verwendeten Protokoll. Proprietäre, hochauflösende Sensoren neigen dazu, mehr zu kosten als einfache Sensoren mit parallelem Ausgang, die zu geringeren Kosten erworben werden können.
Zusammenfassung
Drehgeber werden verwendet, um rotierende mechanische Komponenten wie Wellen und Stangen zu verfolgen. Absolut-Encoder und Inkremental-Encoder sind die beiden Arten von Drehgebern.
Es gibt spezielle Encoder-Schnittstellengeräte, die die Rohdaten eines Drehgebers lesen und die Geschwindigkeits-, Positions- und Distanzinformationen an einen Computer ausgeben können.
Unterstützte Encoder können auch direkt an SPS und andere Computer angeschlossen werden, um die Rohwerte zu erhalten und Berechnungen innerhalb der Software durchzuführen.

